System ID Mode Operation¶
System Identification Mode (SYSID mode) provides a rapid means to develop highly accurate flight dynamics models (also known as Digital Twin) using flight test data. These models generated by actual vehicle data can then be used for math-model validation and improvement (if one is already available), or they can replace the existing model entirely. Tuning of the control laws including simulation of the closed-loop vehicle response can also be done.
The models and associated control law analysis are invaluable in demonstrating required stability metrics as part of airworthiness certifications.
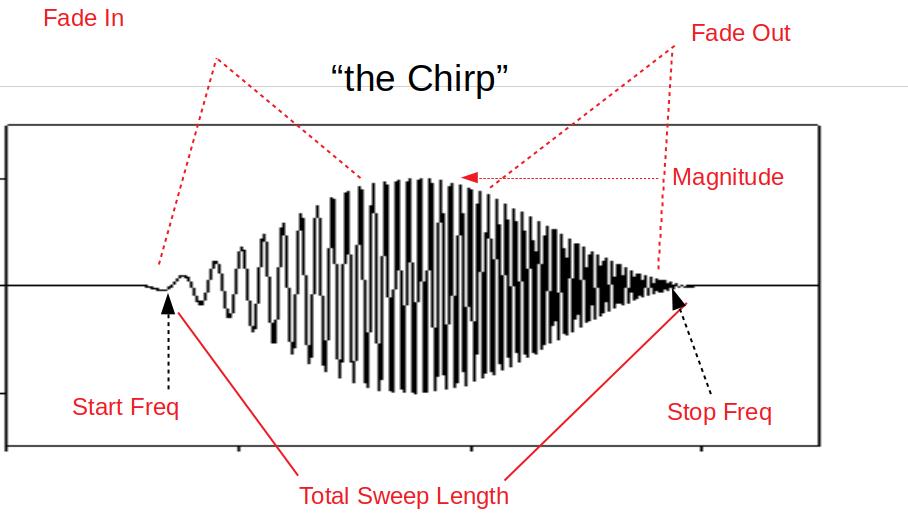
This flight mode produces a data set of stimulus (excitation) signals and measured responses that are recorded in the data flash log. These signals are injected and collected at specific parts of the autopilot depending on the purpose of the model being created. The injected signal (“chirp”) propagates through the autopilot control structures until they are output to physical actuators that cause the vehicle to react to the injected signals. The frequency sweep and amplitude of the “chirp” can be set by parameters, as well as the injection point.
The vehicle’s electrical/mechanical reactions are then monitored by the internal sensors of the autopilot and logged. By recording the output of these sensors and comparing them to the stimulus (injected “chirp” signals) the engineer can gain insight into the electrical/mechanical properties and interactions of the aircraft.
Data Collection¶
The data collection is initiated by switching to the System ID mode. Each time the mode is changed to the System ID flight mode a new data collection is initiated. To change the amplitude of the excitation, the SID_MAGNITUDE parameter can be tuned using the transmitter during the data collection using Transmitter Based Tuning and setting the TUNE parameter in Copter, or the TUNE_PARAM in Plane, to “58” .
The System ID mode provides these capabilities:
Ensures there are effective safety measures to prevent the aircraft from entering an unsafe flight state due to the injected signals
Provides a mechanism to choose where the excitation signal will be injected
Activating the system identification process
Implementation of a chirp-based stimulus signal that would include:
Amplitude
Start frequency
Stop frequency
Recording time
Fade in time
Fade out time
Adjustment of the stimulus amplitude using the tuning knob
Recording the data generated including:
Mixer input data
IMU output data
Adjusting the sub sampling rate.
Logging¶
System ID data logging provides the required reference and IMU data. All system identification data from each time loop is recorded at the same time and placed in the data flash log to ensure data is time synchronized. The new System ID gyro and acceleration measurement logs have been added to the SID log message. These messages are the average gyro and acceleration measurements since the last loop time, taken directly from IMU without any additional filtering. These have been derived from the delta angles and delta velocities that feed into the EKF. The IMU chosen for this log is the same IMU used to generate the attitude prediction in the angle control loops.
Parameters¶
SID_AXIS: Controls which axis and control loop injection point are being excited:
Value |
Description |
|---|---|
0 |
None (prevents entry into mode and display of other mode parameters) |
1 |
Input Roll Angle |
2 |
Input Pitch Angle |
3 |
Input Yaw Angle |
4 |
Recovery Roll Angle |
5 |
Recovery Pitch Angle |
6 |
Recovery Yaw Angle |
7 |
Rate Roll |
8 |
Rate Pitch |
9 |
Rate Yaw |
10 |
Mixer Roll |
11 |
Mixer Pitch |
12 |
Mixer Yaw |
13 |
Mixer Thrust |
14 |
Measured Lateral Position |
15 |
Measured Longitudinal Position |
16 |
Measured Lateral Velocity |
17 |
Measured Longitudinal Velocity |
18 |
Input Lateral Velocity |
19 |
Input Longitudinal Velocity |
SID_MAGNITUDE: System identification Chirp Magnitude. Depending on the injection point, units will be in either deg, deg/s, 0-1 for mixer outputs, m/s for velocity, and m for position. The magnitude can be changed in flight easily using Transmitter Based Tuning, as explained previously.
SID_F_START_HZ: System identification Start Frequency. Range: 0.01-100 Hz
SID_F_STOP_HZ: Frequency at the end of the sweep. Range: 0.01-100 Hz
SID_T_FADE_IN: Time to reach the maximum amplitude of sweep. Range: 0-20 s
SID_T_REC: System identification total sweep length. Range: 0-255 s
SID_T_FADE_OUT: Time to reach zero amplitude at the end of the sweep. Range: 0 to 5 s
The logging rate is set by the ATTITUDE_FAST and ATTITUDE_MEDIUM bits in the LOG_BITMASK. The rate of logging is the main loop frequency divided by a sub-sample factor.
ATTITUDE_FAST |
ATTITUDE_MED |
RATE DIVIDER |
1 |
1 |
1 |
1 |
0 |
2 |
0 |
1 |
4 |
0 |
0 |
8 |
The next figure depicts the SID_AXIS injection points in yellow and some details of the most inner PID loops when ATC_RATE_FF_ENAB = 0.
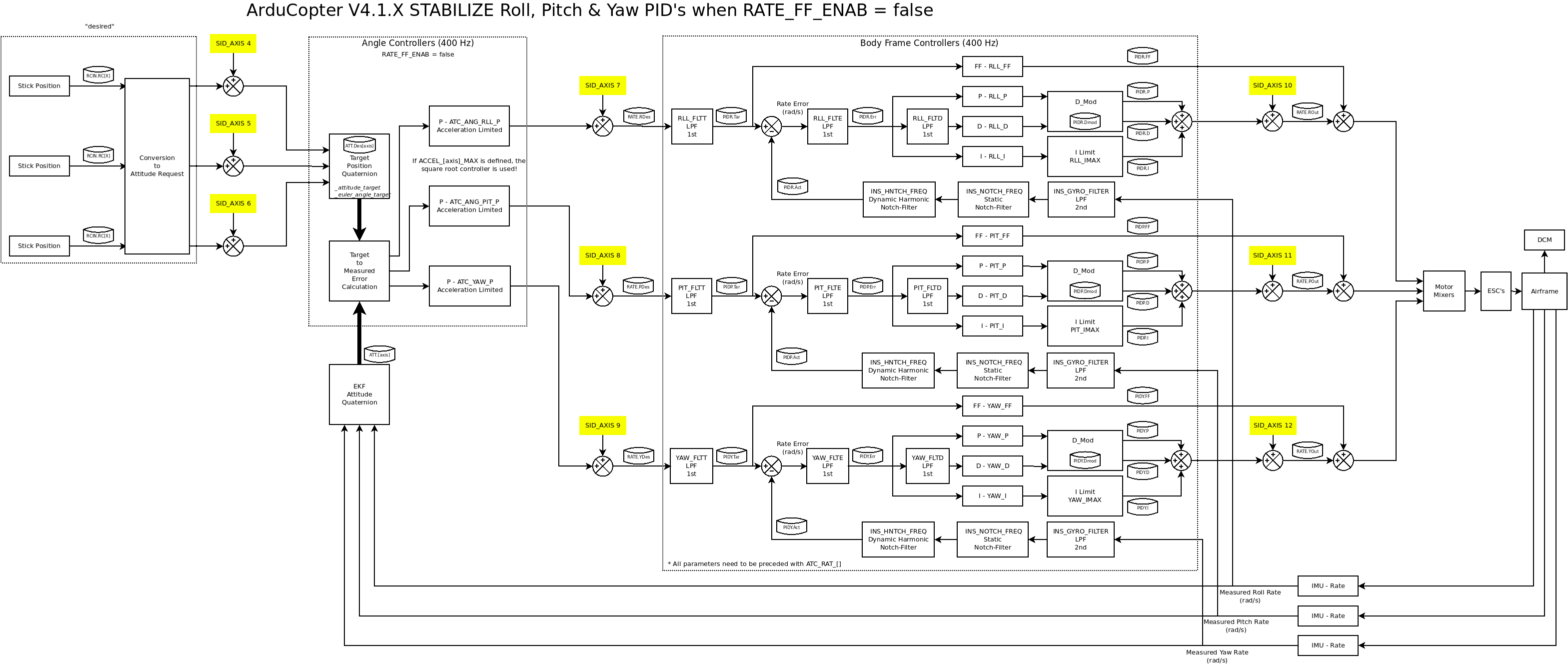
ArduCopter control loops with ATC_RATE_FF_ENAB=0
The next figure depicts the SID_AXIS injection points in yellow and some details of the most inner PID loops when ATC_RATE_FF_ENAB = 1.
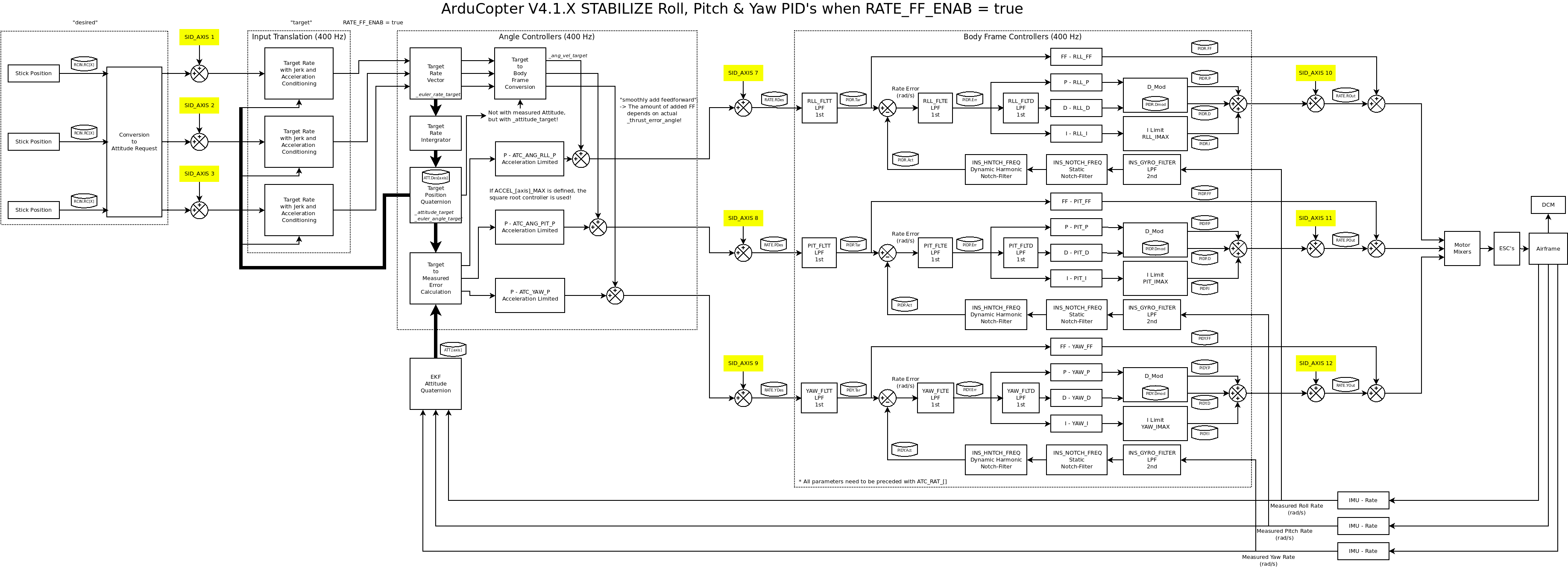
ArduCopter control loops with ATC_RATE_FF_ENAB = 1
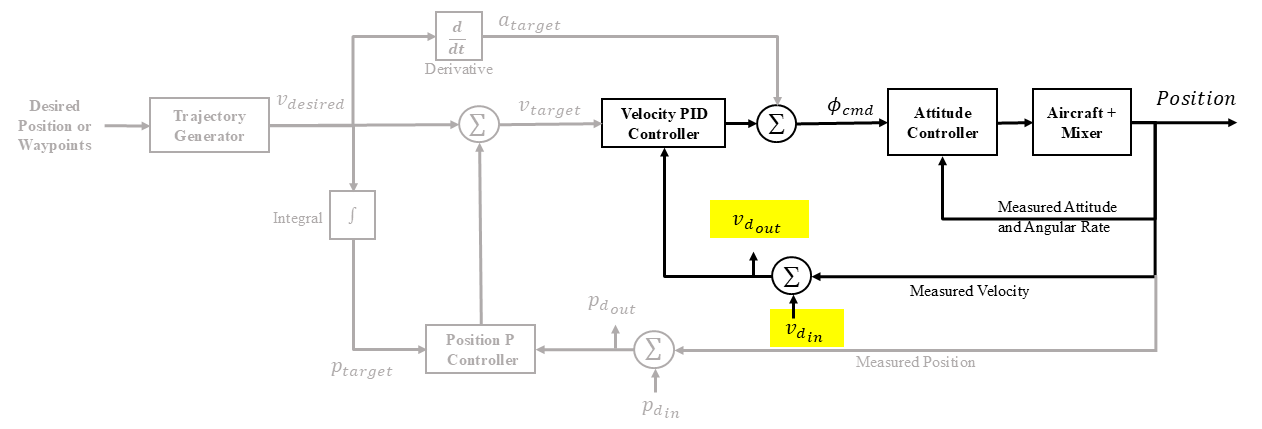
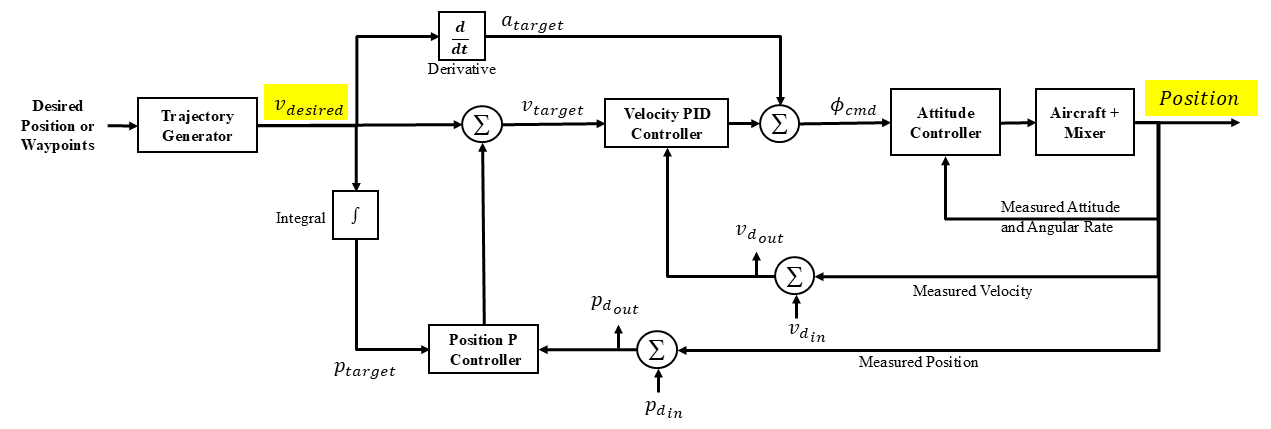
Position controller diagram showing the chirp being input at the desired velocity. Both the velocity and position feedback loops are being used. This input would be used to analyze data to determine position or tracking bandwidth.
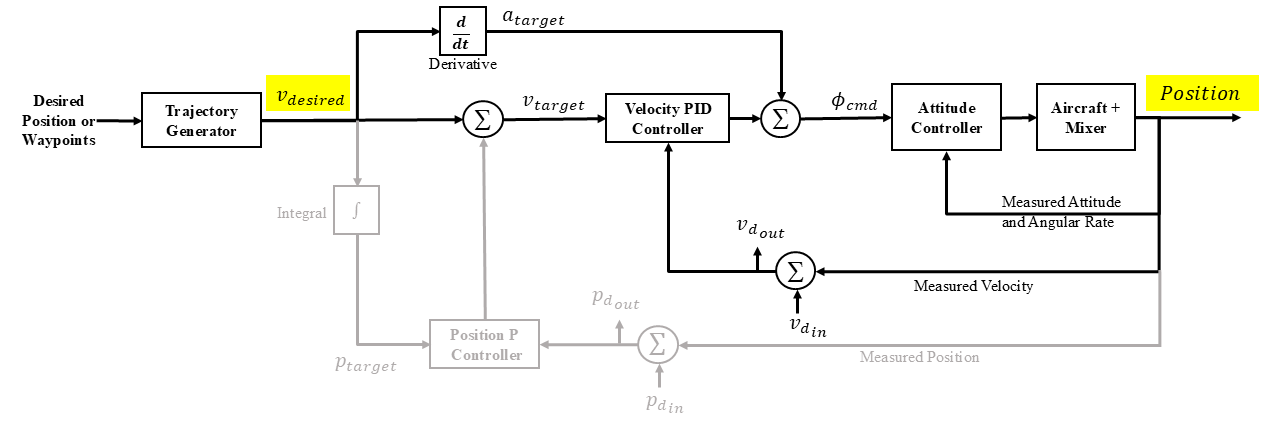
Position controller diagram showing the chirp being input at the desired velocity. Only the velocity feedback loop is being used. This input would be used to analyze data to determine the velocity bandwidth.
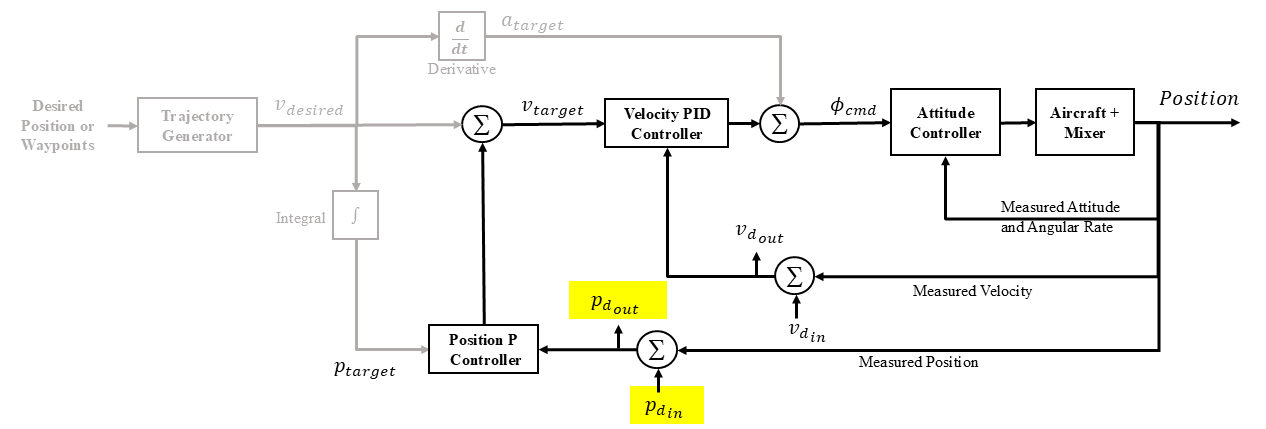
Position controller diagram showing the chirp being input at the measured position. Both the velocity and position feedback loops are being used. This input would be used to analyze data to determine the position disturbance rejection bandwidth.
Position controller diagram showing the chirp being input at the measured velocity. Only the velocity feedback loop is being used. This input would be used to analyze data to determine the velocity disturbance rejection bandwidth.