CUAV Pixhawk v6X¶

Featuring STM32H7 cpu, vibration isolation of IMUs, redundant IMUs, double redundant barometers, IMU heating, and integrated Ethernet for high speed connections to companion computers.
Where To Buy¶
The Pixhawkv6X autopilots are sold by CUAV
Specifications¶
Processor
STM32H753IIK6
STM32F103
Sensors
Bosh BMI088 IMU (accel, gyro)
InvenSense ICM-20649 IMU (accel, gyro)
InvenSense ICM-42688-P IMU (accel, gyro)
RM3100 magnetometer
Dual ICP-20100 barometers
Power
Dual SMBUS/I2C Power Module Inputs
CAN Power Module included with autopilot
Interfaces
8x UARTS, 6 Available for customer use
16x PWM outputs
PPM/SBUS input, DSM/SBUS input
SPI6 port
2x I2C ports for external compass, airspeed sensor, etc. on GPS connector
USB port (with remote cabling), USB connector on module
2 x CAN port
Buzzer and Safety Switch
microSD card
Ethernet
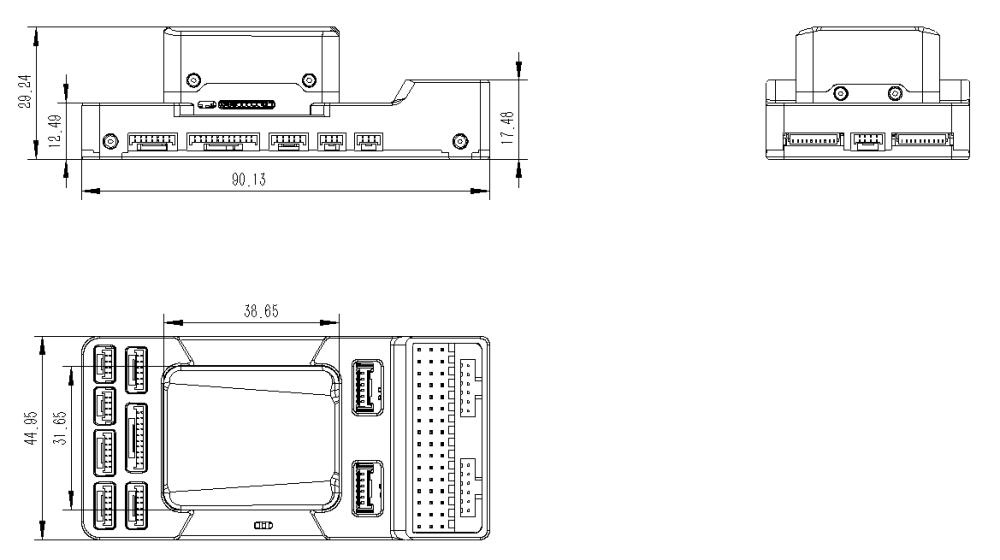
Size and Dimensions
Heat disipating aluminum case
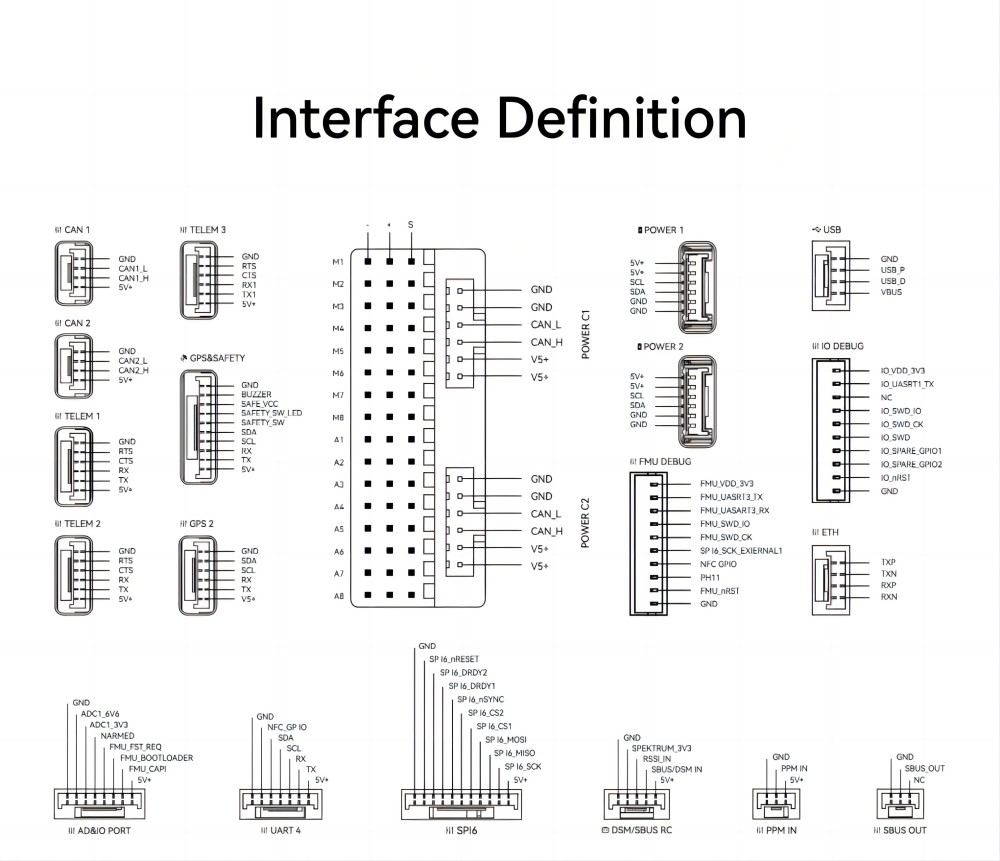
Pinouts¶
UART Mapping¶
SERIAL0 -> USB
SERIAL1 -> UART7 (Telem1) RTS/CTS pins
SERIAL2 -> UART5 (Telem2) RTS/CTS pins
SERIAL3 -> USART1 (GPS1)
SERIAL4 -> UART8 (GPS2)
SERIAL5 -> USART2 (Telem3) RTS/CTS pins
SERIAL6 -> UART4 (User)
SERIAL7 -> USART3 (Debug)
SERIAL8 -> USB Virtual(MAVLink, can be used for SLCAN with protocol change)
RC Input¶
The PPM pin, which by default is mapped to a timer input, can be used for all ArduPilot supported receiver protocols, except CRSF/ELRS and SRXL2 which require a true UART connection. However, FPort, when connected in this manner, will only provide RC without telemetry.
To allow CRSF and embedded telemetry available in Fport, CRSF, and SRXL2 receivers, a full UART, such as SERIAL6 (UART4) would need to be used for receiver connections. Below are setups using Serial6.
SERIAL6_PROTOCOL should be set to “23”.
FPort would require SERIAL6_OPTIONS be set to “15”.
CRSF/ELRS would require SERIAL6_OPTIONS be set to “0”.
SRXL2 would require SERIAL6_OPTIONS be set to “4” and connects only the TX pin.
Any UART can be used for RC system connections in ArduPilot also, and is compatible with all protocols except PPM. See Radio Control Systems for details.
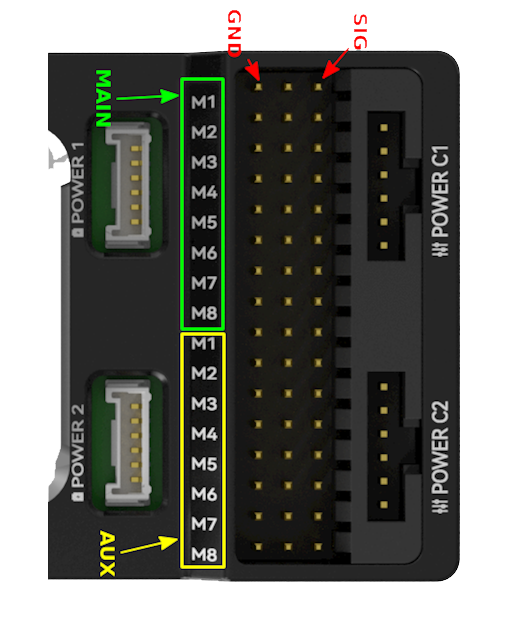
PWM Output¶
The Pixhawkv6X supports up to 16 PWM outputs. All 16 outputs support all normal PWM output formats. All FMU outputs support DShot, except 7 and 8. These do not support serial LEDS either.
The 8 FMU PWM outputs are in 4 groups:
Outputs 1, 2, 3 and 4 in group1
Outputs 5 and 6 in group2
Outputs 7 and 8 in group3
FMU outputs within the same group need to use the same output rate and protocol. If any output in a group uses DShot then all channels in that group need to use DShot.
Battery Monitoring¶
The autopilot defaults are setup for CAN Power Module use (normally supplied with autopilot):
BATT_MONITOR = 8
CAN_P1_DRIVER = 1
CAN_P2_DRIVER = 1
CAN_D1_PROTOCOL = 1
CAN_D2_PROTOCOL = 1
However, the board also has 2 dedicated power monitor ports with a 6 pin connectors. These are intended for use with the I2C power monitors, if desired.
Note
do not try to use the Mission Planner SETUP->Optional Hardware->Battery Monitor tab to setup the I2C power monitors for the Pixhawk6X. The parameters needed for their operation are already setup by default:
BATT_MONITOR = 21
BATT_I2C_BUS = 1
BATT_I2C_ADDR = 65
Compass¶
The Pixhawkv6X has a built-in compass. Due to potential interference, the autopilot is usually used with an external I2C compass as part of a GPS/Compass combination.
GPIOs¶
The 8 FMU outputs can be used as GPIOs (relays, buttons, RPM etc). To use them you need to set the output’s SERVOx_FUNCTION to -1. See GPIOs page for more information.
The numbering of the GPIOs for PIN variables in ArduPilot is:
PWM1 50
PWM2 51
PWM3 52
PWM4 53
PWM5 54
PWM6 55
PWM7 56
PWM8 57
Additional GPIOs:
FMU_CAP1 58
NFC_GPIO 59
Analog inputs¶
The Pixhawkv6X has 2 analog inputs, one 6V tolerant and one 3.3V tolerant
ADC Pin12 -> ADC 6.6V Sense
ADC Pin13 -> ADC 3.3V Sense
Analog 3.3V RSSI input pin = 103
Connectors¶
Unless noted otherwise all connectors are JST GH
Loading Firmware¶
The board comes pre-installed with an ArduPilot compatible bootloader, allowing the loading of xxxxxx.apj firmware files with any ArduPilot compatible ground station.
Firmware for these boards can be found here in sub-folders labeled “Pixhawk6X”.
Bi-Directional DShot firmware variations are available also providing BDShot capability on outputs 1-6.