Acro Mode¶
Acro mode uses the RC sticks to control the angular velocity of the copter in each axis. Release the sticks and the vehicle will maintain its current attitude and will not return to level (attitude hold). Acro mode is useful for aerobatics such as flips or rolls, or FPV when smooth and fast control is desired. Raising the INS_GYRO_FILTER cutoff frequency and retuning may allow better responsiveness, but appropriate harmonic notch filtering to prevent noise impacts must be setup prior to retuning. See Managing Gyro Noise with the Dynamic Harmonic Notch Filters for more information.
Pure rate mode stabilization, utilizing only the gyros with no attitude feedback from the accelerometers, can be forced by setting bit 1 of ACRO_OPTIONS to one. Attitude will still have an open loop correction applied in this mode, similar to “heading hold” tail gyros, but attitude can drift over time.
Rate Loop Only with I-term Scaling¶
When the “Rate Loop Only” option is enabled (bit 1 of ACRO_OPTIONS), the rate controller’s I-term (integral term) is automatically scaled by the angle P gain for each axis. This makes the I-term contribution proportional to the attitude correction strength, mimicking the tuning approach used by Betaflight. Pilots transitioning from Betaflight should find that after ArduPilot tuning (Tuning), the tune will feel more like Betaflight tuning with this option enabled.
With I-term scaling enabled:
The attitude controller bypasses angle-level stabilization and sends rate commands directly to the rate PID controller.
The I-term on each axis (roll, pitch, yaw) is multiplied by that axis’s angle P gain value (e.g. ATC_ANG_RLL_P), providing a coupling between attitude correction and integral wind-up that gives a familiar feel for Betaflight pilots.
Each axis is scaled independently, allowing asymmetric tuning if desired.
Overview¶
The throttle is completely manual with no compensation for tilt angle of the vehicle. If the pilot puts the throttle completely down the motors will go to their minimum rate and stabilization will cease.However, this behavior can be changed by enabling AirMode
Copter includes an Acro Trainer functionality that can be turned on/off to make learning to fly Acro easier.
Stick inputs are interpreted in the “body frame” (as opposed to Sport mode in which they are “earth frame”). The difference between “body frame” and “earth frame” is most obvious when the vehicle is leaned over. For example when pitched forward at 45 degrees, when left yaw is applied if using an earth frame controller (i.e. Sport mode) the copter will maintain its pitch and roll angles as its heading changes. With a body frame controller like Acro it will rotate about the vehicle’s vertical axis meaning the pitch angle will become the roll angle and the roll angle will become the pitch angle.
Warning
Acro is the most difficult flight mode to master and you can look forward to crashing multiple times before you get the hang of it. While Acro mode does not necessarily require GPS, switching to RTL in case of emergency does. Make sure you do have a reliable position estimate prior to arming, most commonly provided by 3D GPS fix with sufficient HDOP.
The above video was filmed in ACRO mode using FPV goggles.
AirMode¶
Acro mode can be setup to provide full stabilization at idle throttle. See AirMode
Acro Trainer¶
The ACRO_TRAINER parameter can be set to:
0 = disabled. This means the pilot operates in full Rate control with no automatic leveling nor angle-limiting performed by the autopilot.
1 = automatic leveling. The vehicle will automatically return to the level when the pilot releases the sticks. The aggressiveness with which it returns to level can be controlled with the ACRO_BAL_ROLL and ACRO_BAL_PITCH parameters. The default of 1.0 will cause it to return to level at up to 30deg/sec. Higher values will make it return more quickly.
2 (Default) = automatic leveling and lean angle limited. Includes the automatic leveling as option #1 but in addition the vehicle will not lean more than 45 degrees (this angle can be configured with the ATC_ANGLE_MAX parameter).
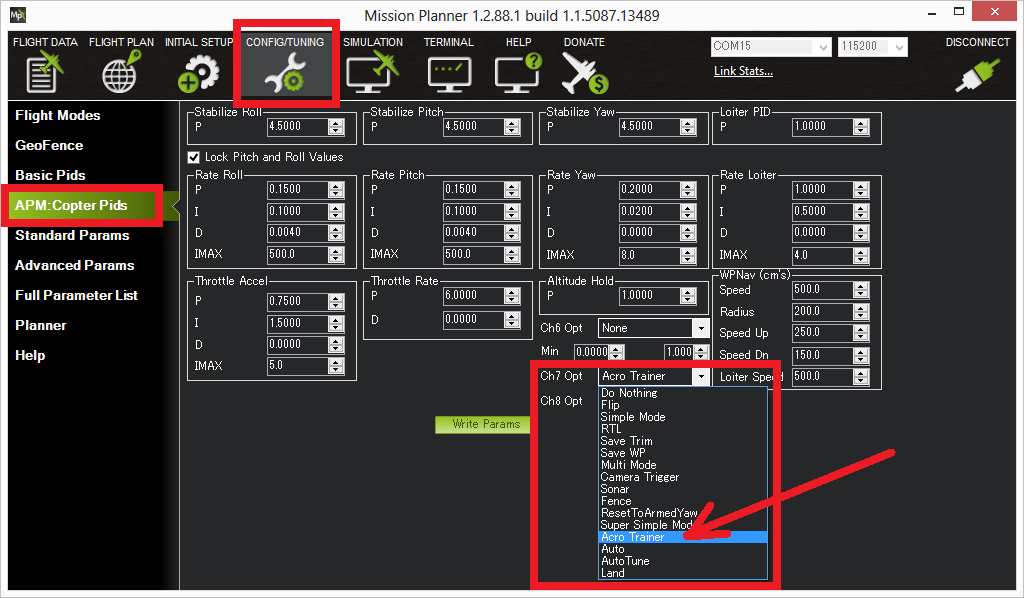
The trainer can be enabled/disabled using the Ch7/Ch8 switches or a channel setup via its RCx_OPTION parameter. With a
3 position switch the off position (i.e. PWM < 1200) will disable the
trainer, middle position will enable option #1 (automatic leveling) and
the top position (i.e. PWM > 1800) will enable option #2 (leveling and
lean angle limited). With a 2 position switch only options #0 (disabled)
and option #2 (leveling & limited) are possible.
Traditional Helicopters¶
For Traditional Helicopters, this modes operates the same. However, experienced pilots might find that this mode has a slightly robotic feel, and attitude jumps as it lifts from the skids that they are not familiar with. In Copter-4.0 and later, a “Virtual Flybar” feature has been introduced, that simulates the classic feel of a flybar helicopter. By setting the ACRO_BAL_ROLL and ACRO_BAL_PITCH parameters to non-zero values, this feature takes effect.
The Virtual Flybar will add decay term to the attitude controller to bleed off accumulated differences between the current attitude and accumulated commanded attitude, if the copter has not quickly obtained it, such as when sitting on the ground but stick inputs are being given. Otherwise, when the helicopter clears it will jump to the accumulated commanded attitude when skids clear, perhaps surprisingly. This is familiar to Multicopter pilots.
Values for ACRO_BAL_ROLL and ACRO_BAL_PITCH parameters ~ 2, will usually give good results.
Note
This feature is not active when ACRO_TRAINER is active
Tuning Parameters¶
ACRO_RP_RATE controls the rotation rate for the roll and pitch axis. The default, 4.5, will command a 200deg/sec rotation rate. Higher values lead to higher rotation rates, lower to slower rotation rates.
ACRO_Y_RATE controls the rotation rate for the yaw axis. The default, 4.5, like roll and pitch, will command a 200deg/sec rotation rate.
ACRO_RP_EXPO and ACRO_Y_EXPO are an amount of Exponential to apply to the pilots stick inputs that only applies to ACRO mode. By default, ACRO mode is much more responsive, even in the center-sticks positions, than the other modes, so this parameter allows the pilot to fine-tune stick response in the control to match what they feel when they are in other modes such as Stabilize, AltHold, PosHold, etc. The default value of 0 applies 30% expo to Roll and Pitch demands from the pilot.
Advanced Tuning Parameters¶
After you have become very confident with flying in ACRO mode, you may want to go deeper in to tuning it based on your vehicle’s performance characteristics. These parameters should be adjusted by advanced users only with the intent of removing “bounce” after very fast roll or flip maneuvers on a vehicle that you are confident is very well tuned. Note that these parameters are global parameters that apply to all flight modes, not just ACRO.
ATC_ACC_R_MAX and ATC_ACC_P_MAX: Maximum acceleration in roll/pitch axis measured in Centi-degres/sec/sec. Let’s say you have a highly nimble quadcopter and you have your ACRO_RP_RATE parameter set to 9, which translates to a roll request of ~400deg/sec. The copter is not physically capable of going from 0deg/sec to 400deg/sec without a brief moment of acceleration. During that time, error is building up in the controller in order to get you to 400deg/sec. When you let off the sticks, that error can still be present, resulting in an overshoot of desired attitude, followed by a bounce-back. This parameter can be tuned to help remove that error during the maneuver and soften if not remove the bounce-back. Note that this is completely different from tuning the Rate D terms for Pitch and Roll, and should come only after those terms are properly tuned.
ATC_ACC_Y_MAX: Maximum acceleration in Yaw axis measured in Centi-degress/sec/sec. Same principle as ATC_ACC_R_MAX and ATC_ACC_P_MAX but on the YAW axis based on the ACRO_Y_RATE parameter value (likely a much lower, more attainable value.)
ATC_THR_MIX_MAN: Balance between attitude and throttle control. This value can be increased to improve attitude control when the throttle is cut for better Airmode handling, however a stable tune is essential before it can be increased.