Tailsitter Planes¶
In ArduPilot tailsitters are any VTOL aircraft type that rotates the fuselage (and autopilot) when moving between forward flight and hover.
Despite the name, not all tailsitters land on their tails. Some are “belly landers”, where they lie down flat for landing to improve takeoff and landing stability in wind. Some may have an undercarriage for wheeled takeoff and others may have a stand or other landing aid.
All tailsitters are considered types of QuadPlanes in ArduPilot. You should start off by reading the QuadPlane documentation before moving onto this tailsitter specific documentation.
Tailsitters and their parameters are enabled by setting Q_TAILSIT_ENABLE to either “1” ,for most tailsitters, or “2” for the special case of Copter Motor Only Tailsitters (those without control surfaces like elevons or ailerons/elevators).
Vectored and non-Vectored¶
ArduPilot sub-divides tailsitters into two broad categories:
Vectored tailsitters can tilt their rotors independently of the movement of the fuselage, giving them vectored thrust
Non-vectored tailsitters have fixed rotor orientation relative to the fuselage, and rely on large control surfaces for hover authority (although dual motor versions can use differential thrust for body frame yaw control also)
Within Non-vectored are two sub-categories, Single/Dual Motor and CopterMotor:
Single/Dual Motor uses one or two motors and can employ only differential thrust if dual motor. Single motor tailsitters are similar to normal 3D planes that can hover using large control surfaces exposed to the single motor prop wash for control, but with ArduPilot providing the control stability for hovering, loitering, and VTOL mission navigation. Dual Motor add differential thrust to assist in body frame yaw control, while copter motor tailsitters are almost the same as a multicopter when in VTOL stance with flying surfaces, if present, adding to the control.
CopterMotor uses three, four, or more motors and operates in a more copter-like fashion. These may or may not have control surfaces usable in fixed wing flight for control. ** CopterMotor tailsitters without them (ie. only have a lifting wing with no control surfaces) must always use their motors to provide control while in fixed wing flight modes. Setting Q_TAILSIT_ENABLE = 2 automatically does this.**
Tailsitter Configuration¶
firmware versions 4.1 and earlier¶
The key to make a QuadPlane a tailsitter is to either set Q_FRAME_CLASS =10 or Q_TAILSIT_MOTMX non-zero. That tells the QuadPlane code to use the tailsitter VTOL backend.
firmware version 4.2 and later:¶
To make a QuadPlane a tailsitter is to set Q_TAILSIT_ENABLE to “1” or “2” to tell the QuadPlane code to use the tailsitter VTOL backend.
If Q_TAILSIT_MOTMX is zero (the default), meaning no multicopter-like motors, it provides roll, pitch, yaw and thrust (Throttle, Throttle Left, Throttle Right) values to the fixed wing control code. These values then control your ailerons, elevons, elevators, rudder and forward motors.
This has a nice benefit when setting up the tailsitter that you can follow the normal fixed wing setup guide in MANUAL and FBWA modes, and then when you switch to hover all of your control directions will be correct.
It also means that you can fly any fixed wing aircraft that is capable of 3D flight as a single or dual motor tailsitter, and fly it in modes like QSTABILIZE, QHOVER and QLOITER.
However, it can also have copter-like motors, like a conventional QuadPlane if Q_TAILSIT_MOTMX is non-zero. Then this parameter determines which motors remain active in normal forward flight (plane modes). If non-zero, then use the Q_FRAME_CLASS and Q_FRAME_TYPE parameter to configure the multicopter motor style, and the appropriate MOTORx outputs will be activated.
Q_FRAME_CLASS determines the number and layout of VTOL motors and Q_TAILSIT_MOTMX determines which motors are active when in fixed wing modes, except in the special case of the Copter Motor Only Tailsitter which keeps running the motors like a Copter mode even when flying in a fixed wing mode for control surface-less Copter tailsitters (ie always running the motors to provide attitude control, even at low throttle).
Tailsitter Style |
ENABLE |
CLASS |
TYPE |
MOTORMASK |
Motor Output Functions |
|---|---|---|---|---|---|
3D Single Motor |
1 |
10(Single/Dual) |
NA |
0 |
Throttle |
Twin Motor and Twin Motor Vectored |
1 |
10(Single/Dual) |
NA |
0 |
Left Throttle, Right Throttle |
Copter Tailsitters with fixed wing control surfaces |
1 |
to match number of VTOL motors |
to match motor mixing |
active motors in fixed wing modes |
Motor 1- Motor x |
Copter Tailsitters with no fixed wing control surfaces |
2 |
to match number of VTOL motors |
to match motor mixing |
active motors in fixed wing modes |
Motor 1- Motor x |
The ENABLE column refers to the Q_TAILSIT_ENABLE parameter, while CLASS,TYPE, and MOTORMASK refer to Q_FRAME_CLASS, Q_FRAME_TYPE, and Q_TAILSIT_MOTMX, respectively.
Motor Layout¶
Copter Tailsitters¶
All the copter motor layouts are supported as CopterMotor tailsitters if Q_TAILSIT_MOTMX is non-zero . See Copter’s Motor Layout Section. If non-zero, then use the Q_FRAME_CLASS and Q_FRAME_TYPE parameter to configure the multicopter motor style, and the appropriate MOTORx outputs will be activated.
Note
in firmware versions previous to 4.1, CopterMotor Tailsitters did not use any yaw torque control. Roll (with respect to plane body) is only controlled by the flying surface (ailerons or elevons). Now QUAD PLUS and X frames have yaw control via motors, and frame types 16 and 17 are added that have no torque yaw control, as previous versions of PLUS and X did.
Note
(firmware 4.1 and earlier)it is possible to have a CopterMotor Tailsitter using no fixed wing control surfaces, ie basically a quadcopter with a wing. For that configuration, all Copter motors would be set to be active in fixed wing modes via Q_TAILSIT_MOTMX and Q_OPTIONS bitmask would have bit 7 (Force QASSIST) set to have QASSIST active in all modes. With firmware 4.2 and later, for this configuration, use Q_TAILSIT_ENABLE = 2 which forces QASSIT all the time. Q_TAILSIT_MOTMX is ignored in that case.
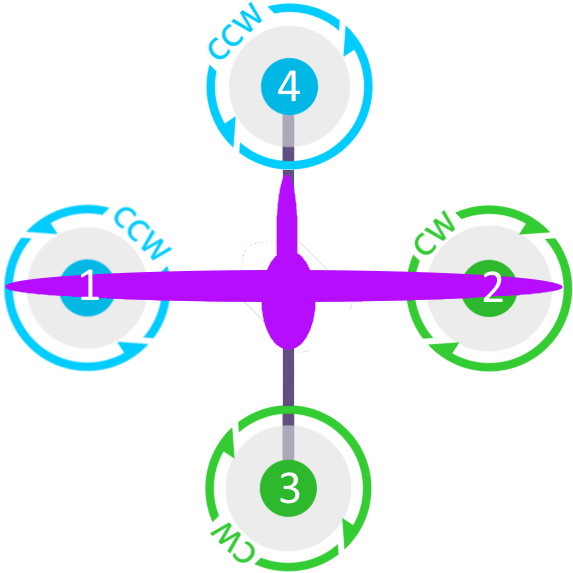
In addition, two Copter tailsitter specific configurations are available which provide No Yaw Torque (NYT) control to the copter style motors: Q_FRAME_TYPE = 16 (Plus) and =17 (X).
(looking down on nose from above)
NYT QUAD PLUS Motor Tailsitter¶
Motors are controlled by the M1-M4 outputs:
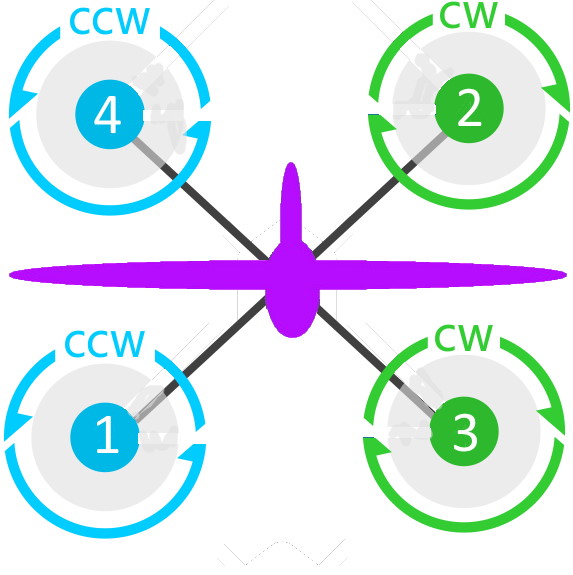
NYT QUAD X Motor Tailsitter¶
Motors are controlled by the M1-M4 outputs:
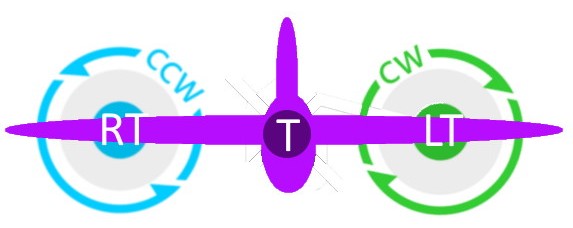
Single/Dual Motor Tailsitter¶
If Q_TAILSIT_MOTMX is zero and Q_FRAME_CLASS =10, then the Single/Dual Motor configuration is used. Motors may also be vectored using tilt servos, which gives much higher control authority. If not vectored, these frames rely on large control surfaces, exposed to the prop flow, in order to maintain control. The motor layouts are shown below:
(looking down on nose from above)
Motors are controlled by the Throttle, Throttle Left, Throttle Right outputs:
Autopilot Orientation¶
The AHRS_ORIENTATION, the accelerometer calibration and Level trim should all be done for fixed wing flight. Fixed wing flight is considered “normal” orientation for a tailsitter.
when in VTOL flight the nose of the aircraft will try to point vertically for “level” flight
when in fixed wing flight the nose of the aircraft will try to point horizontally for “level” flight
Key parameters¶
The key differences between fixed wing flight and VTOL for a tailsitter are:
when in VTOL the copter style PID gains will be used (the ones starting with
Q_A_RAT_x)when in fixed wing flight the fixed wing PID gains will be used (the
RLL_RATE_xandPTCH_RATE_xgains)Q_TAILSIT_RLL_MX allows the roll limit angle limit to be set differently from Q_A_ANGLE_MAX. If left at zero, both pitch and roll are limited by Q_A_ANGLE_MAX. If Q_TAILSIT_RLL_MX is nonzero roll angle will be limited and pitch max angle will still be Q_A_ANGLE_MAX. This should be set if your tailsitter can achieve much larger pitch angle than would be safe for roll (some airframes can’t recover from high-speed knife-edge flight using only yaw control).
Q_TRIM_PITCH can be used to account for any offset in hovering pitch angle due to the thrust line not being through the CG, or to counter fixed wing AHRS trim used to set angle of attack in cruise, instead of using PTCH_TRIM_DEG for adjusting the trim since it is only in fixed modes and AHRS trim affects all modes. Set this such that the vehicle does not drift forwards or backwards in QSTABILIZE or QHOVER with no pilot inputs.
Tip
After calibrating the accelerometers, using the “LEVEL” calibration position as normal fixed wing flying attitude, you may find that the VTOL nose up hover drifts to one side (ie earth frame roll), as well as front to back. While there is a Q_TRIM_PITCH adjustment for pitch trim, there is not for roll. You may use the “LEVEL” only calibrate button in Mission Planner (the “ahrstrim” command in MAVProxy) to set the pitch and roll trim while in Nose Up VTOL hover attitude, if you change the mode to QSTABILIZE or QHOVER while doing so. This may change the fixed wing pitch trim, but not the fixed wing roll trim. Therefore, you may have to re-adjust the PTCH_TRIM_DEG parameter to get the desired pitch attitude in fixed wing flight, as well as the Q_TRIM_PITCH value, but this should correct the side drift.
Vectored Thrust¶
If your tailsitter has vectored thrust then you should set the
SERVOn_FUNCTION values for your two tilt servos for the left and right
motors and for the left and right motor throttles.
Note
All tailsitters ignore the Q_TILT_TYPE parameter, and require continuous output servos, and will drive the tilt servos appropriately.
For example, if your left tilt servo is channel 5 and your right tilt servo is channel 6, then set:
SERVO5_FUNCTION =75
SERVO6_FUNCTION =76
and you need to assign left throttle to the left motor and right throttle to the right motor, for example using the SERVO 7 and SERVO 8 outputs, for left and right motor escs, respectively:
SERVO7_FUNCTION =73
SERVO8_FUNCTION =74
You also need to set the right SERVOn_REVERSED values, and the correct
SERVOn_TRIM, SERVOn_MIN and SERVOn_MAX values, as appropriate.
Q_A_ANGLE_BOOST should be disabled for vectored thrust tailsitters. Failure to disable this will cause the throttle to decrease as the nose dips, making the nose dip even further and resulting in a crash.
Caution
When disarmed, switching to QHOVER or QLOITER will force the motors forward into fixed wing orientation. If armed in this position, a prop strike could occur for Belly Sitter configurations. Tilt will be raised to VTOL position when throttle is raised above idle, but the strike will have already occurred. The solution is to momentarily raise the throttle above idle, allowing the tilts to raise, return throttle stick to idle, then arm. This needs to be done also for AUTO mode takeoffs, which should be started from QSTABILIZE with motors raised, armed, and then change to AUTO for the takeoff.
Tilt Rotor Movement Setup¶
TVBS (Thrust Vectored Belly Sitter)¶
TVBS are just dual motor vectored thrust tailsitters that don’t sit on their tails, but rather their belly. Aside from making sure props clear (ie sufficient throw on tilt servos) when in the horizontal stance, nothing special is required to make it take off from a horizontal stance.
At least 45 degree throw, either side of neutral (fixed wing flight position) is required, with 60 degrees being most desirable. Otherwise, the vehicle will “skid” along the ground a bit when you raise the throttle to bring it vertical on takeoff. Takeoffs, required a decisive move of throttle to hover or above to reduce the “skid”.
For landing in fixed wing, manual throttle controlled modes, there is an RCx_OPTION (89) that will force the tilt servos upright at idle throttle, and optionally force the pitch to target LAND_PITCH_DEG for flaring to the normal fixed wing landing. This allows intentional or emergency fixed wing landings in MANUAL, ACRO, STABILIZE, and FBWA modes without the risk of a prop strike in configurations where this could occur otherwise.
Vectored Gains¶
There are two vectoring gains available. One controls the amount of vectored thrust movement in hover, and the other controls the amount of vectored thrust movement in forward flight.
The Q_TAILSIT_VHGAIN parameter controls vectored thrust in hover. A typical value is around 0.8, which gives a lot of control to vectored thrust in hover. This control is combined with control from your elevon mixing gain (controlled by MIXING_GAIN).
The Q_TAILSIT_VFGAIN parameter controls vectored thrust in forward flight. A typical value is around 0.2, which gives a small amount of control to vectored thrust in forward flight. This control is combined with control from your elevon mixing gain (controlled by MIXING_GAIN).
By adjusting the relative values of Q_TAILSIT_VHGAIN, Q_TAILSIT_VFGAIN and MIXING_GAIN you can adjust how much control you have from elevons and thrust vectoring in each flight mode.
CopterMotor PID Gain Scaling¶
There are a number of options for scaling control surface movement versus speed. Control surface effectiveness is dependent on airspeed they see, in tailsitter configurations this is heavily driven by the motor layout and prop wash. A copter tailsitter with lots of control authority from thrust and small control surfaces will be much less sensitive to these gain scheduling parameters. For a vehicle with large control surfaces care must be taken to setup gain scaling to best suit the configuration.
The gain scaling scheme is selected with Q_TAILSIT_GSCMSK, it is a bitmask, some options can be used in combination, others must be used in isolation.
The maximum and minimum scaling that can be applied by any scheme is set by Q_TAILSIT_GSCMIN and Q_TAILSIT_GSCMAX. If a scheme is working well at all but the extremes these endpoints can be adjusted.
Tip
Scaling is done relative the hover throttle point, ensure this is set correctly before proceeding, see: Flight Modes, QHOVER mode.
Disk theory gain scaling is the most advanced method available and should result in the best results, if setup correctly.
Throttle scaling (Bit 0)¶
Control surfaces will be scaled directly with throttle. High throttle will result in less control surface movement, low throttle will result in more. This method is always used for thrust vectoring scaling in non-CopterMotor tailsitters independent of Q_TAILSIT_GSCMSK.
Reduce gain at high throttle/tilt (Bit 1)¶
Attitude/throttle based gain attenuation, with this option control surface deflection is reduced at high tilt angles and high throttle levels to prevent oscillation at high airspeeds. This can be used in combination with throttle scaling.
Disk theory (Bit 2)¶
Disk theory gain scaling attempts to calculate the airspeed seen on the control surfaces as a result of both prop wash and forward airspeed. In order for this calculation to be done Q_TAILSIT_DSKLD must be set. This is the aircraft weight in KG divided by the total disk area of the propellers. The disk area for each propeller is calculated from the radius, the disk area of all propellers should then be summed. This allows ArduPilot to calculate the airspeed directly behind the propeller, however on a real vehicle 100% of the control surface is not in the direct prop wash.
For example if half of the control surfaces are in the prop wash the calculated disk loading value should also be halved. Some tuning will be required for best performance, If oscillations are seen at high throttle Q_TAILSIT_DSKLD should be reduced.
For best results an airspeed sensor should be fitted.
Altitude correction (Bit 3)¶
Gain is scaled with altitude, this should be considered when operating over a wide range of altitudes, this method can be enabled in combination with any other method.
Transitions¶
Tailsitter transitions are a little different than other QuadPlane transitions.
Q_TAILSIT_ANGLE specifies how far the nose must pitch down in a VTOL mode before transition to forward flight is complete. So a value of e.g. 60 degrees results in switching from copter to plane controller (forward transition) when the nose reaches 30 degrees above the horizon (60 degrees down from vertical). The pitch rate used when pitching down to forward flight is given by Q_TAILSIT_RAT_FW, this rate will be held until Q_TAILSIT_ANGLE is reached.
For the back transition from forward flight to VTOL, the plane controller will be used until the nose reaches Q_TAILSIT_ANG_VT above the horizon. If Q_TAILSIT_ANG_VT is 0 Q_TAILSIT_ANGLE will be used for both forward and back transitions. The pitch rate used when pitching up to VTOL flight is given by Q_TAILSIT_RAT_VT, this rate will be held until Q_TAILSIT_ANG_VT is reached.
Note
if you back transition while on the ground, ie sitting in a FW mode at zero throttle, armed, and then switch to a VTOL mode, the motors will immediately start spinning until the “transition” completes and the motors tilt up. This can result in ground movement. To help prevent this, you can set Q_OPTIONS bit 18 to prevent arming unless already in a VTOL mode.
Depending on the entry speed and time required to transition, the vehicle may gain altitude, sometimes significantly, since the throttle is set to the current Q_M_THRST_HOVER hover thrust value throughout the transition to VTOL. This can be overridden with a lower value by setting Q_TAILSIT_THR_VT. With experimentation, changing the rates, angle, and this parameter for fixed wing to VTOL transitions, it is possible to obtain almost level altitude transitions. Especially with copter style tailsitters with no control surfaces using Q_TAILSIT_ENABLE = 2, keeping attitude control active even at low or zero throttle values.
Note
During transitions, pilot input is disabled and vehicle attitude and throttle is controlled totally by the autopilot.
Tip
ArduPilot will send as message to the GCS when transition is complete, these can be found in the Mission Planner messages tab. If the transition does not complete normally the transition parameters and vehicle tune should be checked. A example message is `Transition FW done, timeout`, the timeout time is one and a half times the expected transition time as calculated from the angle and rate parameters.
Control Surfaces¶
Although usually not recommended, it is possible to fly a tailsitter aircraft with no control surfaces. Care should be taken to get the vehicle flying well in the hover modes first.
Q_OPTIONS bit 7:Force Qassist will force the vehicle to use the copter controller in all flight modes.
Q_OPTIONS bit 8:Mtrs_Only_Qassist allows use of the copter controller for the motors but leave any controls surfaces under plane control, this allows the control surfaces to act as ‘trim tabs’ for the motors.
See Assisted Fixed-Wing Flight for more details on how Qassist can be automatically enabled and disabled with airspeed, altitude, attitude, and/or by RCx_OPTION switch.
Tailsitter Input¶
You can change how control inputs while hovering a tailsitter will be interpreted using the Q_TAILSIT_INPUT parameter. The choices are:
Q_TAILSIT_INPUT =0 means that in hover the aircraft responds like a multi-rotor, with the yaw stick controlling earth-frame yaw, and roll stick controlling earth-frame roll. This is a good choice for pilots who are used to flying multi-rotor aircraft.
Q_TAILSIT_INPUT =1 means that in hover the aircraft responds like a 3D aircraft, with the yaw stick controlling earth-frame roll, and roll stick controlling earth-frame yaw. This is a good choice for pilots who are used to flying 3D aircraft in prop-hang, but is not very useful when flying around, due to the earth-frame multicopter control inputs.
Q_TAILSIT_INPUT =2 and 3 mean that the aircraft responds like a 3D aircraft with the yaw stick controlling earth-frame yaw and the roll stick controlling body-frame roll when flying level. When hovering, these options behave the same as types 0 and 1, respectively. This is accomplished by splitting the roll and yaw command inputs into bodyframe roll and yaw components as a function of Euler pitch.
Note
Due to the rotation of the tailsitter body frame with respect to the multicopter body frame, the roll limits are set by parameter Q_YAW_RATE_MAX (in degrees), and the yaw rate limits are set by parameter Q_TAILSIT_RLL_MX (in deg/sec). The pitch limit is set by parameter Q_A_ANGLE_MAX (in degrees), and this also serves as the yaw rate limit if Q_TAILSIT_RLL_MX is zero. If any rate limit is too high for the airframe, you may experience glitches in attitude control at high rates.
Note
Q_TAILSIT_INPUT is ignored in QACRO modes. All inputs are body-frame referenced.
Tailsitter Input Mask¶
Note
Use of this feature is not recommended since its removed in 4.2 and later firmware revisions
To support people with experience flying 3D aircraft and wanting to learn how to
prop-hang manually, you can set the Q_TAILSIT_MASK<Q_TAILSIT_MASK> to determine which
channels will have full manual input control without attitude stabilization while hovering in QHOVER and QSTABILIZE.
The mask of manual channels is enabled using a transmitter input
channel, specified with the Q_TAILSIT_MASKCH<Q_TAILSIT_MASKCH> parameter.
For example, if you are learning how to fly 3D aircraft, and you want some assistance learning how to best control the rudder, then you can set:
Q_TAILSIT_MASK<Q_TAILSIT_MASK>=8 (for rudder)Q_TAILSIT_MASKCH<Q_TAILSIT_MASKCH>=7
then when channel 7 goes above 1700 the pilot will be given full manual control of rudder when hovering. This provides good 3D piloting practice on one or more axes at a time.
Center of Gravity¶
The center of gravity for a tailsitter is important in an extra dimension. When hovering it is important that there is not too much weight in the belly of the plane or on its back, so that it leans forward or back. This is particularly important for non-vectored tailsitters.
Pre-Arm Issues¶
Due to an issue in DCM related to compass fusion for yaw when pointing straight up, sometimes the AHRS subsystems will disagree when powering up, nose up. Slight errors in compass calibration, while resulting in a successful calibration, may worsen this effect.
The result is that some setups will give a pre-arm failure. Typically it is “Pre-Arm:DCM roll/pitch inconsistent by “x” degrees” or similar. If this happens consistently, then one of two solutions can be used:
Power up horizontally, and allow the autopilot to begin initialization in this position. After the IMUs tilt initialization is completed (usually in the first ten to fifteen seconds or so), the Tailsitter can be set vertically for the remainder of the initialization (ie after GPS lock and EKF is using the GPS) and then armed.
Or, if you get the Pre-Arm failure above, lay the Tailsitter down horizontally for 10-30 seconds to allow the various AHRS subsystems to synchronize. After that it can be raised and arming should proceed normally.