Using DO_RETURN_PATH_START Mission Command¶
While the DO_LAND_START mission command provides a means of defining a “landing sequence” that can be directly jumped to for autolandings or failsafe actions, in some cases this direct path might result in breaching fences or flying into obstacles.
The DO_RETURN_PATH_START mission command can be used to mark a place or places in the mission sequence, before the DO_LAND_START, that the vehicle should directly rejoin the mission path at the closet point on the mission leading toward the DO_LAND_START sequence, rather than directly to the DO_LAND_START. As shown below:
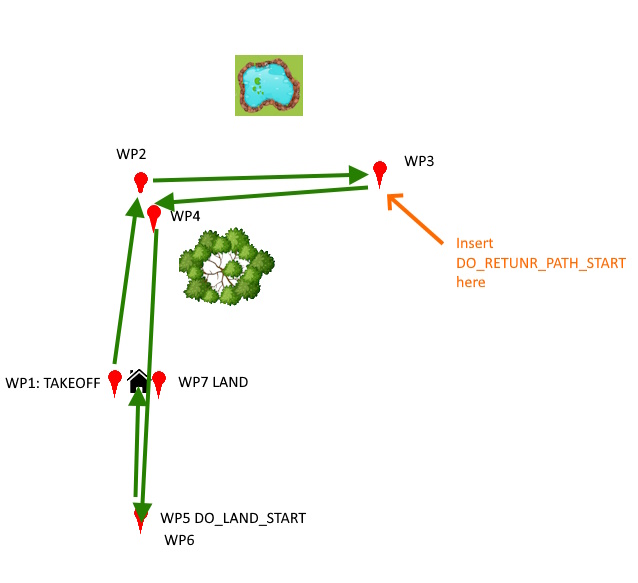
Imagine above that the vehicle takes off, flies to WP2 and 3, and if one were to fly up and look at the lake but then have a failsafe, the vehicle would fly directly back to the DO_LAND_START tag, crashing thru the tree, exclusion fence, etc. But if a DO_RETURN_PATH_START mission item is inserted after WP 3, then the vehicle would return to the mission path, proceed to the waypoint after the DO_LAND_START tag and LAND safely.
Multiple DO_RETURN_PATH_START items can be placed in the mission sequence to tailor the return. It is not necessary that the sequence include a DO_LAND_START, but if it does, the return to the mission will occur after the DO_RETURN_PATH_START mission command but before the DO_LAND_START.