Ornithopters¶
Ornithopters differ from conventional airplanes by not having a propeller, but rather flapping wings.
Ornithopters, especially those that resemble birds, benefit greatly from having the ardupilot system on-board, as this way they can be set to “patrol an area”, and thus scare off “flying pests” such as pigeons, … (these damage freshly sown fields by eating the seeds planted, also eat fruit such as currants, blueberries, … )
Ready-to-fly (RTF) ornithopters are not obtainable. Ornithopters can be build, however, using the ornithopter kits from BirdKit. There are some designs (i.e. Kestrel), you can also print the airframe and wing flapping mechanism using a 3D-printer. Kazuhiko provides such 3D-printable files from the Kazuhiko Kakuta Shapeway shop. The 3D-printable parts need to be combined with the fuselage of other kits (more is explained on this image, this excel file, and these youtube video’s.
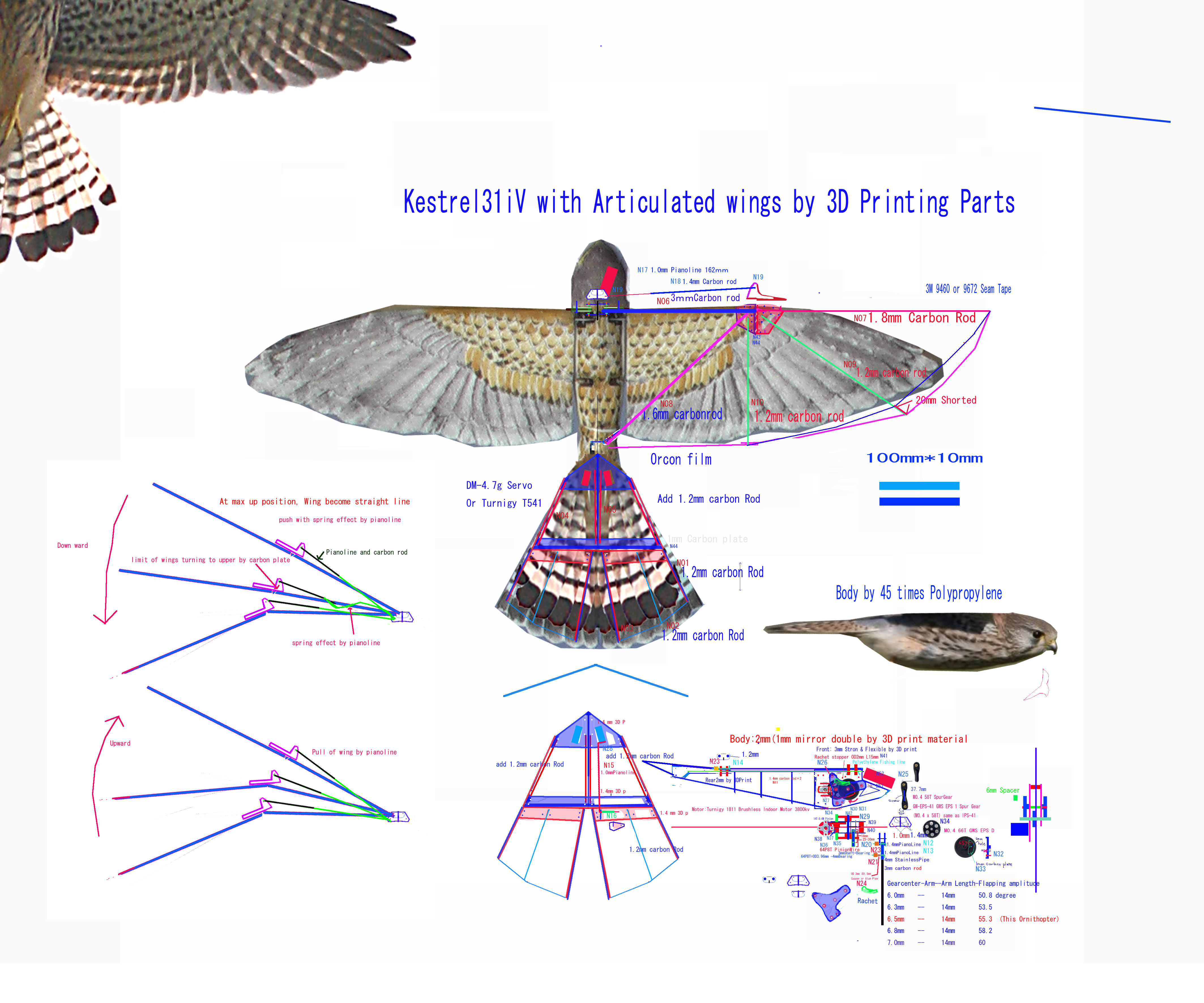{kind=link}
You can also try to build an ornithopter from scratch. Ornithopter.org has info on how to do this. There’s also an ornithopter gearbox for sale by Birdkit, and some ornithopter gearboxes can also be found at shapeways.
At least two ornithopters (GosHawk25iV made by Kazuhiko, and Robird by Clear Flight Solutions) are known to work with an ardupilot autopilot. The GosHawk25iV, and the proprietary Robird, so in theory, many ornithopters could be made to work with it.
Autopilot Setup Differences¶
Fixed wing aircraft generally use 4 control outputs: aileron, elevator, throttle and rudder.
In Orinthopters, these primary controls are:
wing ailerons -> split tail ailerons/elevators, for banking.
wing elevators -> some (not all) ornithopters have split tail ailerons/elevators, for pitch control.
throttle -> wing flapping throttle.
(optionally)rudder -> some (ornithopters have a swinging tail for yaw control.
Wing Construction¶
For the wings, they can be built using 3D-printed wing spars (or profiles that fit around a carbon spar. The airfoil profile can be any cambered profile depending on the ornithopter design, and the exact airfoil is usually calculated. The angle of attack is often about 15 degrees.