TAKEOFF Mode¶
Automatic takeoff can be accomplished either as a mission control command in AUTO mode (NAV_TAKEOFF) or by directly changing into the TAKEOFF mode. See also the Automatic Takeoff topic for general setup information for automatic takeoffs.
TAKEOFF Flight Mode¶
Automatic Takeoff is also a mode itself. When entered, the plane will use maximum throttle as set by the TKOFF_THR_MAX parameter, climbing with TKOFF_LVL_PITCH maximum and takeoff roll limits (LEVEL_ROLL_LIMIT ) up to the TKOFF_ALT altitude. Then, it will loiter at TKOFF_ALT altitude until the mode is changed. If the plane travels for TKOFF_DIST from the point where the mode is entered, before reaching TKOFF_ALT altitude, then it will loiter at that spot, still trying to climb to TKOFF_ALT.
Once TKOFF_LVL_ALT is reached, or the loiter point distance is reached, maximum throttle and takeoff roll limits (LEVEL_ROLL_LIMIT ) are stopped and normal navigation begins towards the loiter point and altitude. Normally, TKOFF_LVL_ALT is 10 meters and is intended to limit navigation (roll) in order to prevent wing tip ground strikes.
If the mode is entered while already flying, it will immediately begin loitering as in LOITER mode if at or above TKOFF_ALT altitude above ground, otherwise it will climb to that altitude and then begin loitering .
TAKEOFF mode can also be entered via a switch using an RCx_OPTION = 77, as well as via normal selection by the flight mode channel.
TAKEOFF Heading¶
Before takeoff it is important that the plane be pointing into the wind, and be aligned with the runway (if a wheeled takeoff is used). The plane will try to hold its heading during takeoff, with the initial heading set by the direction the plane is facing when the takeoff starts. It is highly recommended that a compass be enabled and properly configured for auto takeoff, as takeoff with a GPS heading can lead to poor initial heading control such that heading can different from the initial heading by tens of degrees during the climb. While this may not be an issue for hand launches, runway takeoffs require a compass for adequate heading control during the takeoff rollout.
If you are using a wheeled aircraft then you should look at the
WHEELSTEER_* PID settings for controlling ground steering. If you
are hand launching or using a catapult you should look at the
TKOFF_THR_MINACC and TKOFF_THR_MINSPD parameters.
TAKEOFF Throttle¶
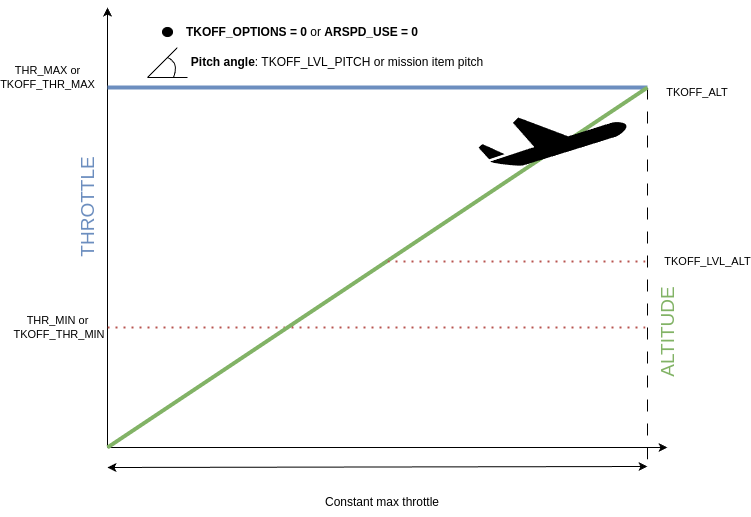
By default, Plane will set the throttle to TKOFF_THR_MAX (or if that is 0, to THR_MAX) up until it reaches TKOFF_ALT. This behaviour is reflected in the TKOFF_OPTIONS bit 0 setting, which by default is 0 (unset).
In case more fine-grained throttle control is required, an airspeed sensor must be installed and enabled via the ARPSD_USE parameter and TKOFF_OPTIONS bit 0 must be set to 1. IF no airspeed sensor is enabled or TECS_SYNAIRSPEED is enabled (not recommended), then this bit has no effect.
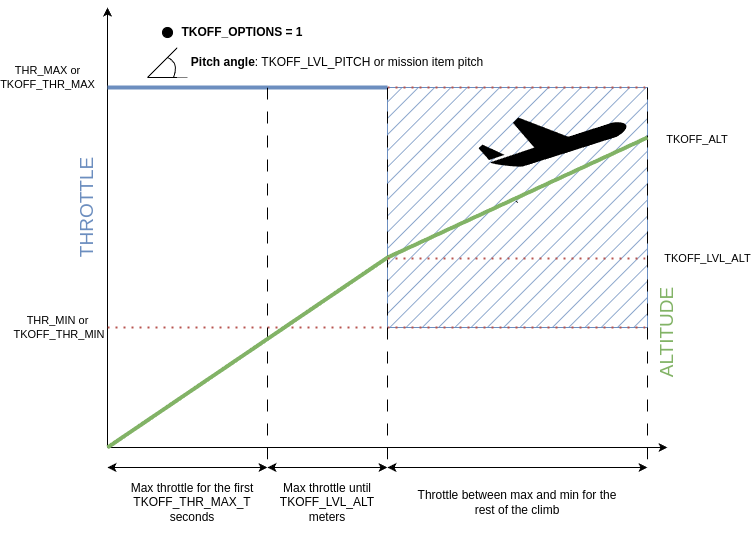
In this configuration, right after takeoff the throttle is set to TKOFF_THR_MAX for TKOFF_THR_MAX_T or until TKOFF_LVL_ALT (whichever lasts longer).
Finally, the throttle will be managed by the TECS controller to achieve a speed controlled, maximum (TECS_CLMB_MAX) climb, ranging between TKOFF_THR_MIN and TKOFF_THR_MAX.
The difference between these two throttle control options can be seen in the following diagrams: