Archived:Interfacing with Pixhawk using the NSH¶
This article explains how to communicate with a Pixhawk using the NuttX Shell (NSH) using either a serial or remote connection.
Overview¶
The Pixhawk runs the NuttX real-time operating system which includes the NuttX Shell terminal “NSH”. This allows running some Unix style commands including “top” and “ls”.
NSH is very useful for diagnosing low level issues. Some of the things you can do with it include:
Display performance counters with the
perfcommandDisplay px4io status information
Diagnose microSD errors
Diagnose sensor failures
Assist in debugging new drivers
Running NSH using Debug Cable and Serial5¶
To use the NSH while Copter or Plane is running you can connect using Serial 4/5. To do this you will need an FTDI 3.3V cable and then modify a DF13 6 Position cable so that it can be connected to the FTDI cable.
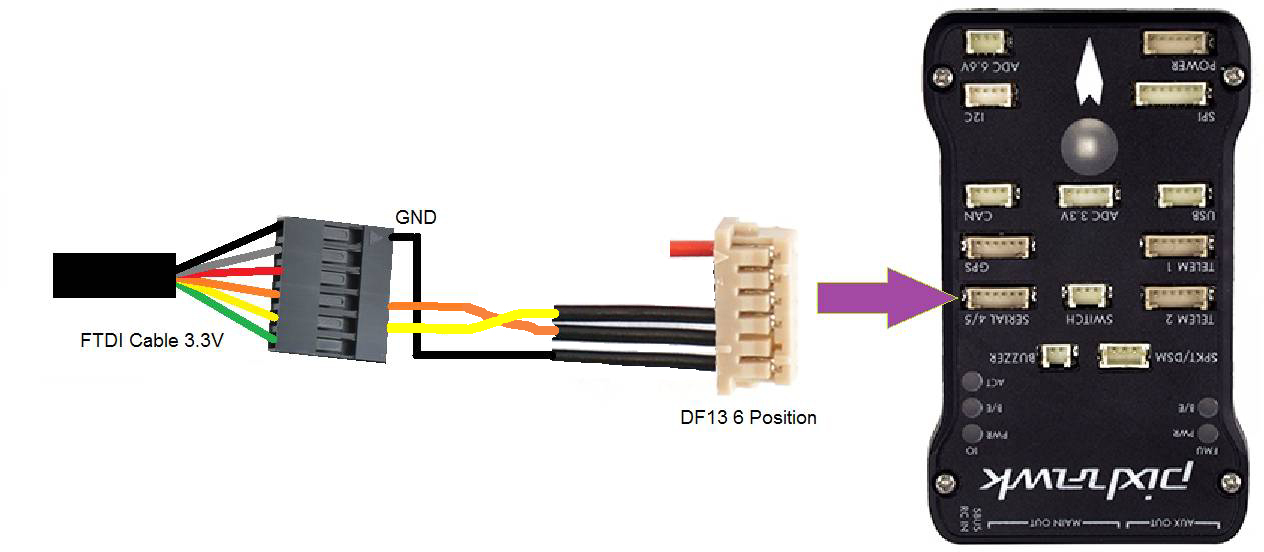
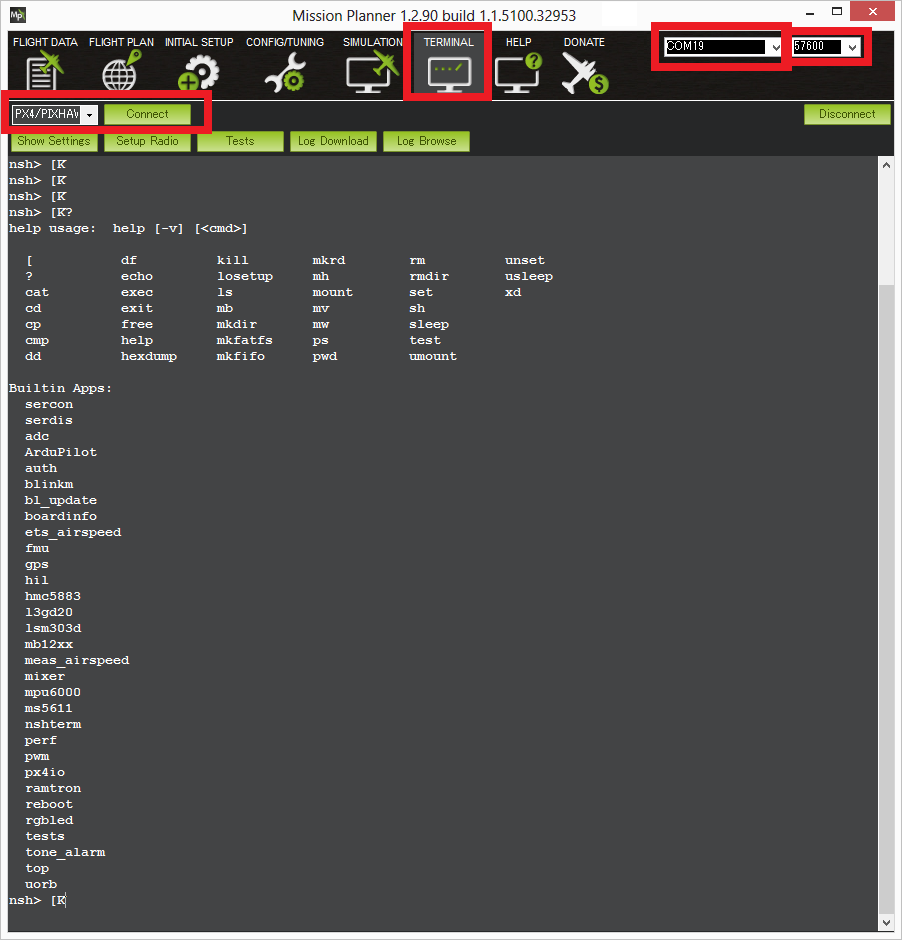
You should then be able to plug the FTDI cable into your computer and connect with any Serial program including the Mission Planner’s Terminal screen. Ensure to select the FTDI cable’s COM port and set the Baud rate to 57600. You will need to press return for the “nsh>” prompt to appear.
Remote NSH over MAVLink¶
ArduPilot also includes support to run nsh commands remotely via MAVLink over a USB, telemetry or WiFi link (this is an extension of the SERIAL_CONTROL protocol used for controlling a GPS or radio UART over MAVLink).
Note
At time of writing Rover doesn’t support NSH over MAVLink (because it doesn’t support arming).
Tip
This can be used for nsh debugging when you don’t have a serial5 cable setup.
Instructions to use with Mission Planner:¶
Connect Pixhawk to PC using a USB cable
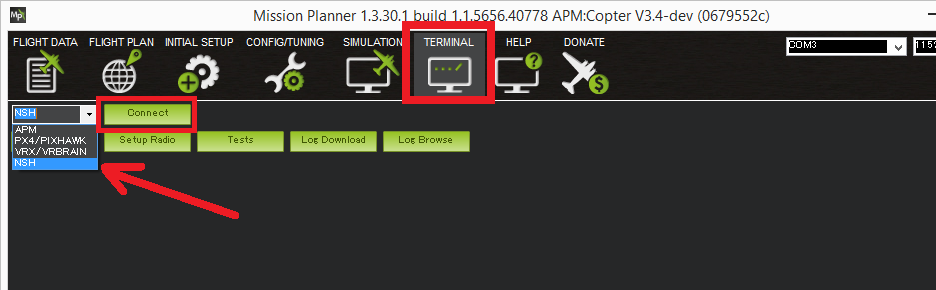
Go to the Flight Data screen, select the correct COM port and baud (probalby 115200) and press the connect button
Go to the Terminal screen, set the left-most drop down to “NSH” and push Connect.
Setup instructions to access using MAVProxy:¶
Load latest master onto a Pixhawk
Grab the latest MAVProxy
If on Linux use:
sudo pip install mavproxy
If on Windows grab it here.
Note
- If you are on Windows you will need to delete any old
version of MAVProxy in c:\Program Files (x86)\MAVProxy first, as the installer does not properly cleanup old versions.
Start MAVProxy as usual
Load the nsh module in MAVProxy with
module load nsh
start the nsh shell with
nsh start
Now run nsh commands as usual. Note that MAVLink is still running, so the map, MAPVproxy console, graphs etc all keep updating while in the nsh shell.
Tip
A blank response to an NSH command may indicate low RAM memory on the autopilot board. Free up memory if possible. For example, on master you can save about 20Kb by disabling terrain following (set
TERRAIN_ENABLE=0).To drop back to the normal MAVProxy prompt type a single “.” on a line by itself
You can only start a shell when the system is disarmed. Once the shell is started you can arm if you like.
Warning
In theory you could fly while doing nsh commands, but we don’t recommend it.
This also works over a 3DR Radio link, although it is of course slower in output than when on a USB connection.