Archived: Building ArduPilot for Flymaple on Linux¶
Warning
ARCHIVED ARTICLE
ArduPilot no longer supports FlyMaple.
Note
Support for FlyMaple in ArduPilot was removed in May 2016. This documentation is for older versions
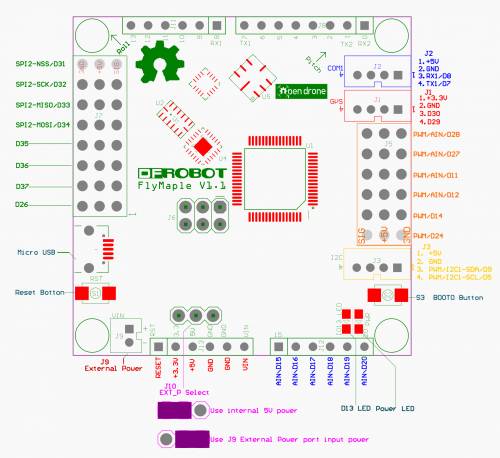
About Flymaple¶
The APMPilot firmware has been ported to run on Flymaple
Flymaple is an inexpensive board based on a 75MHz ARM Cortex-M3 processor.
It includes 10DOF sensors (accelerometer, gyroscope, magnetometer and barometer).
How to build APM for Flymaple on Linux.¶
You need a number of additional resources to build ardupilot for Flymaple.
I have assumed that you will install them in your home directory.
But they can really go anywhere provided you make the appropriate changes to PATH and config.mk
cd ~
git clone https://github.com/mikemccauley/libmaple.git
cd libmaple
wget http ://static.leaflabs.com/pub/codesourcery/gcc-arm-none-eabi-latest-linux32.tar.gz
tar xvzf gcc-arm-none-eabi-latest-linux32.tar.gz
export PATH=$PATH:~/libmaple/arm/bin
cp main.cpp.example main.cpp
make
At this stage you can test your flymaple CPU and the upload process with ‘make install’
This will upload a simple LED blinking program to your Flymaple board.
Now download ardupilot APM:
cd ~
git clone --recurse-submodules https://github.com/ArduPilot/ardupilot.git
cd ardupilot
Now edit config.mk to be something like this:
#config.mk START
# Select maple_RET6 for Flymaple
BOARD = maple_RET6
# HAL_BOARD determines default HAL target.
HAL_BOARD ?= HAL_BOARD_FLYMAPLE
# The communication port used to communicate with the Flymaple
PORT = /dev/ttyACM0
# You must provide the path to the libmaple library directory:
LIBMAPLE_PATH = $(HOME)/libmaple
# Also, the ARM compiler tools MUST be in your current PATH like:
# export PATH=$PATH:~/libmaple/arm/bin
#config.mk END
Now build APM for, say a rover:
cd Rover
make flymaple
make upload
Documentation on how to wire up and configure APM on Flymaple for a buggy type rover are at: