Battery Failsafe¶
The battery failsafe can be configured to automatically switch the vehicle into RTL, SmartRTL or Land mode if the vehicle battery voltage drops below a specified voltage for 10 seconds or the estimated remaining capacity has dropped below a configurable threshold.
Note
This failsafe requires the vehicle have a working Power Module.
Note
ArduPilot firmware versions 4.0 and later support up to 9 batteries/power monitors. The discussion below applies to those optional batteries also. Each can trigger a failsafe and each can have different actions and setup values. In addition, a group of batteries can be treated as a single unit, see BATTx_MONITOR = 10.
When the failsafe will trigger¶
If enabled and set-up correctly the battery failsafe will trigger if the main battery’s
voltage drops below the voltage held in the BATT_LOW_VOLT parameter (or FS_BATT_VOLTAGE in older versions) for more than 10 seconds. The default voltage is 10.5 volts. If set to zero, the voltage based trigger will be disabled.
remaining capacity falls below the BATT_LOW_MAH parameter (or FS_BATT_MAH in older versions) 20% of the battery’s full capacity is a good choice (i.e. “1000” for a 5000mAh battery). If set to zero, the capacity based trigger will be disabled (i.e. only voltage will be used)
What will happen¶
When the failsafe is triggered:
Buzzer will play a loud low-battery alarm
LEDs will flash yellow
“Low Battery!” will be displayed on the ground stations HUD (if telemetry is connected)
Then one of the following will happen:
Nothing if the vehicle is already disarmed or executing RTL or Land
Disarm motors if the vehicle is in Stabilize or Acro mode and the throttle is at zero OR the vehicle is landed
The user configurable action held in the BATT_FS_LOW_ACT parameter
0 : None - no action will be taken
1 : Land - the vehicle will switch to Land mode
2 : RTL - the vehicle will switch to Return-to-Launch mode if possible but if not possible (because of no good position estimate) the vehicle will Land (Recommended)
3 : SmartRTL or RTL - the vehicle will switch to SmartRTL mode if possible, if not possible (because SmartRTL’s position buffer is full) the vehicle will switch to RTL. If RTL is also not possible (because of no good position estimate) the vehicle will switch to Land
4 : SmartRTL or Land - the vehicle will switch to SmartRTL mode if possible, if not possible (because SmartRTL’s position buffer is full) the vehicle will switch to Land
5 : Terminate - the vehicle will disarm the motors. This is a dangerous option that should not be used in most cases
6 : Auto DO_LAND_START or RTL - the vehicle will jump to the nearest “DO_LAND_START” mission item or RTL if no “DO_LAND_START” mission item has been programmed (see Using DO_LAND_START).
7 : Switch to Brake mode if it can, otherwise, switch to Land.
As with all failsafes, the user can re-take control of the vehicle by changing the flight mode switch to another mode. The battery failsafe will not trigger again unless the two-layer failsafe is setup (see below)
The FS_OPTIONS parameter (Copter 4.0 and later) is a bitmask parameter to select one or more options that modify the standard actions of the radio, GCS, and battery failsafe. In the Mission Planner full parameter list or full parameter tree, the handy checkbox popup window is an easy way to set this (and any other bitmask) parameter. Be sure to go to Help > Check Beta Updates to pull the latest parameter definitions first while connected to the internet. The FS_OPTIONS bits are as follows:
bit 0 set: Continue if in auto mode on Radio Failsafe
bit 1 set: Continue if in auto mode on Ground Control Station Failsafe
bit 2 set: Continue if in guided mode Radio Failsafe
bit 3 set: Continue if landing on any failsafe
bit 4 set: Continue in pilot control on Ground Control Station Failsafe
if none of the above are set, then execute the BATT_FS_LOW_ACT or BATT_FS_CRT_ACT options as configured.
Note
Only bitmask bit 3 affects actions taken during Battery failsafe. This parameter also works in conjunction with the GCS and radio failsafe, so ensure you are taking all options into account when setting this parameter.
Note
Even if the failsafe action is set to “None” (i.e. BATT_FS_LOW_ACT = 0) the buzzer will buzz and the LEDs will flash yellow. To completely disable the battery failsafe set BATT_LOW_VOLT and BATT_LOW_MAH to zero.
Note
Once the battery failsafe has triggered, it cannot be reset until the autopilot is rebooted.
Setting up using Mission Planner¶
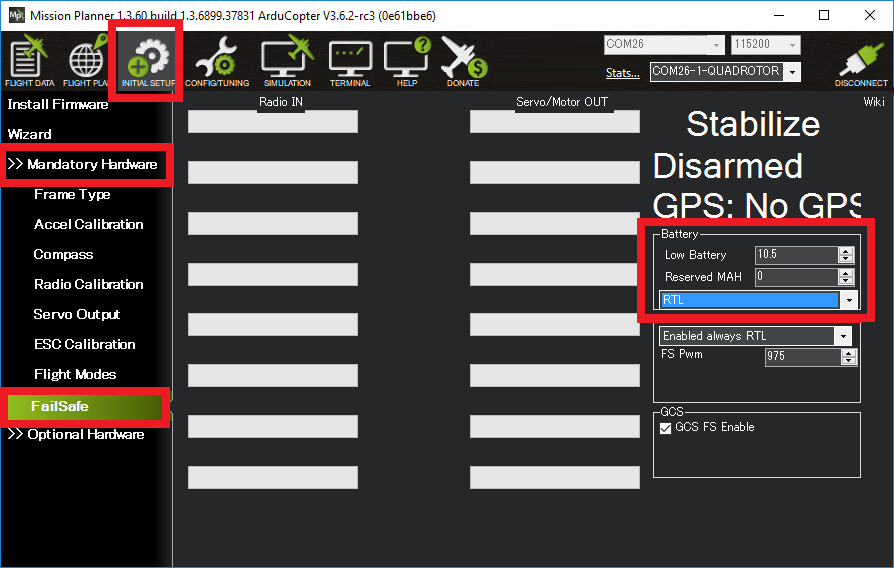
On the INITIAL SETUP | Mandatory Hardware | Failsafe page:
If the Battery section parameters are greyed out follow instructions to setup the Power Module
Set the “Low Battery” threshold voltage (i.e. 10.5 volts)
Set the “Reserved MAH” or leave as “0” if the failsafe should never trigger based on estimated current consumed.
Select the desired behavior (Land, RTL, SmartRTL, etc) from the drop-down list
Two-Layer failsafe¶
ArduPilot includes a two-layer battery failsafe. This allows setting up a follow-up action if the battery voltage or remaining capacity falls below an even lower threshold.
BATT_CRT_VOLT - holds the secondary (lower) voltage threshold. Set to zero to disable.
BATT_CRT_MAH - holds the secondary (lower) capacity threshold. Set to zero to disable.
BATT_FS_CRT_ACT - holds the secondary action to take. A reasonable setup would be to have BATT_FS_LOW_ACT = 2 (RTL) and BATT_FS_CRT_ACT = 1 (Land)
Advanced Settings¶
BATT_FS_VOLTSRC allows configuring whether the raw battery voltage or a sag corrected voltage is used
BATT_LOW_TIMER can configure how long the voltage must be below the threshold for the failsafe to trigger
BATTx_parameters can be setup to trigger the failsafe on other batteries