Frame Class and Type Configuration¶
MultiCopters¶
The FRAME_CLASS and FRAME_TYPE parameters should be set to match the physical frame being used. See the Connect ESCs and Motors page for the list of supported multicopter frames
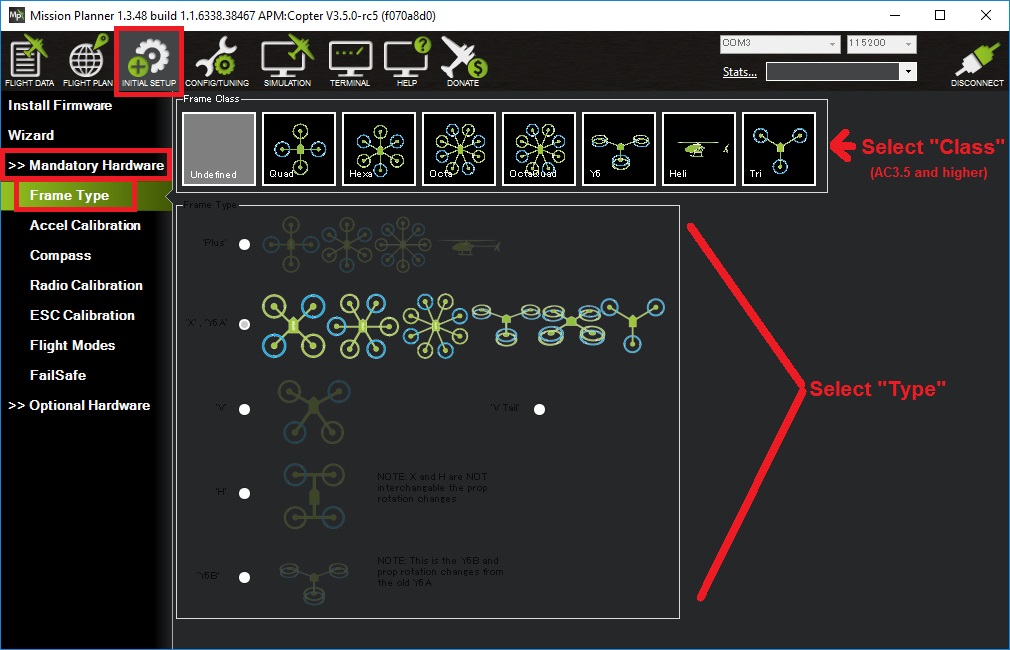
If using the mission planner select Initial Setup, Mandatory Hardware | Frame Type. If you are using another Ground Station it should be possible to set the FRAME_CLASS and FRAME_TYPE parameters directly through a parameter update screen.
Note
For Traditional Helicopters, “Heli” should already be selected and it should not be changed. For Single Copter and Coax Copter the FRAME_CLASS parameter should be set directly from the Full Parameter List until this issue is resolved.
Next select the frame “Type” for your vehicle. The default type is X.
For Tricopters, Y6, Traditional Helicopters, Bicopters, SingleCopters and CoaxCopters the frame type is ignored.
Motor Order Diagrams¶
See the Connect ESCs and Motors page for the list of supported multicopter frames
Traditional Helicopters¶
Traditional Helicopters run a different version of firmware. See Traditional Helicopters for setup and tuning information.
HeliQuads are a hybrid frame using Traditional Helicopter firmware but four motors.