Follow Me Mode (GCS Enabled)¶
Follow Me mode makes it possible for you to have your copter follow you as you move, using a telemetry radio and a ground station.
Note
Unlike other autopilot modes, this feature is implemented in the Ground Station. The ground station controls the movement by reading the vehicle position using MAVLink Telemetry and sending GUIDED mode instructions to move the vehicle appropriately. Currently this sort of functionality is supported by Mission Planner for Windows laptops, APM Planner for OS X laptops, and DroidPlanner for Android devices.
What you’ll need¶
Instructions for Mission Planner¶
Set one of your flight modes to “Loiter”
Set up your Copter and establish a MAVLink connection over wireless telemetry
Ensure that your GPS USB dongle or Bluetooth device is plugged into to your laptop and showing up as a serial port. Using the software that came with the module, make sure that it’s working and that you have GPS lock.
Take off, and once in the air switch to Loiter. (Make sure there’s sufficient altitude to ensure the drone does not injure you).
In Mission Planner Flight Data screen try right-clicking on a nearby spot and select “Fly to Here”. If this works, you’re ready to try Follow Me mode.
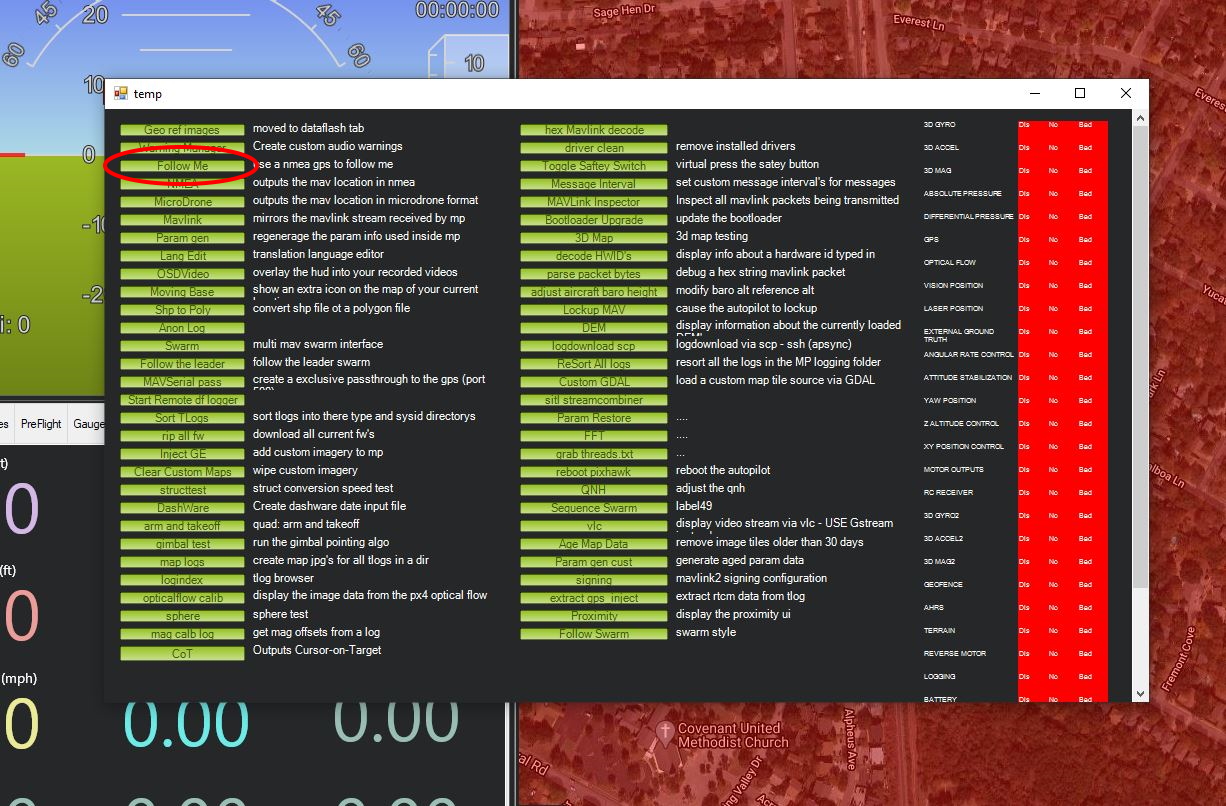
In Mission Planner, enter Control-F to open the following window. Click on “Follow Me”
This will bring up this window. Select the serial port that’s assigned to your GPS device and the baud rate it uses.
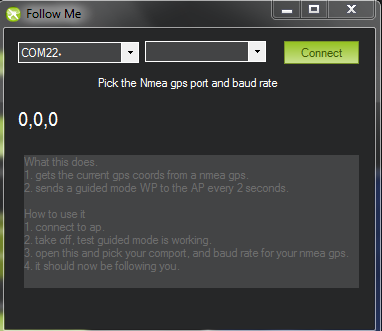
Once you click “Connect”, Mission Planner will read GPS data from your device and send it to your Copter as “fly to here” commands every two seconds.
Now pick up your laptop and start walking around.
The Copter should follow you!
Make sure to set sufficient altitude to prevent any injuries.
If proper altitude is set, you can make it follow you and attempt to out run it!
Warning
The barometer is used in the altitude calculation meaning that it can drift over time and impact rising terrain. Watch for obstacles and elevation changes. The altitude maintaining behavior is similar to loiter mode.