Echologger ECT400 echosounder¶
The EchoLogger ECT400 is an echosounder (aka underwater sonar) with a 100m range, 5 degree beam width and 1hz ~ 10hz update rate. More details can be found in the datasheet

image courtesy of echologger.com
Note
Support for this sensor was added to Rover-3.4.
Recommended Hardware¶
ECT400 can be purchased after emailing echologger.com
USB to RS232 converter to allow testing and configuring the sensor with a PC
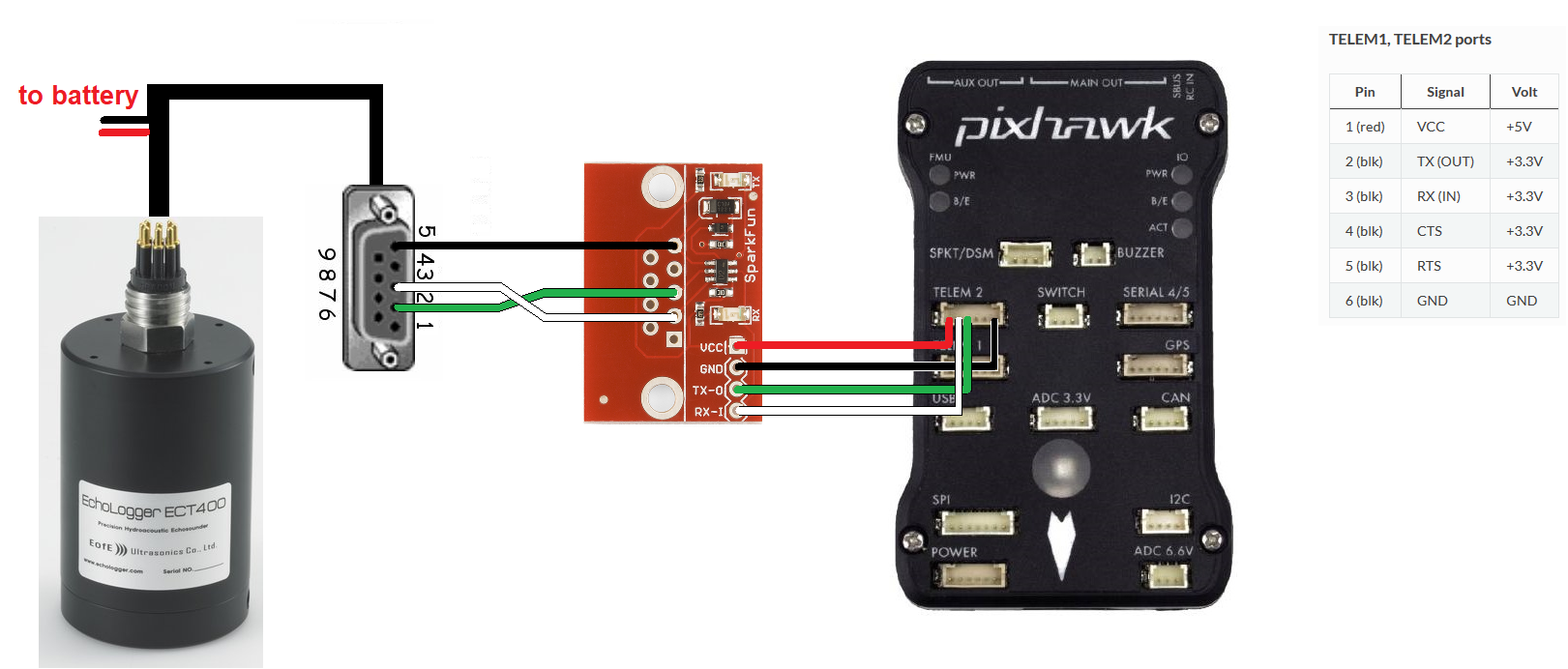
Connecting and Configuring¶
The ECT400 provides distance measurements using the NMEA protocol over serial at 115200 baud.
The sensor can be connected to any available serial/uart port on the autopilot. In the diagram below the first sensor is connected to SERIAL2.
If the SERIAL2 is used then the following parameters should be set:
SERIAL2_PROTOCOL = 9 (Lidar)
SERIAL2_BAUD = 115 (115200 baud)
Then the following range finder related parameters should be set:
RNGFND1_TYPE = 17 (NMEA)
RNGFND1_MIN = 0.13
RNGFND1_MAX = 100 (i.e. 100m). This is the distance in meters that the rangefinder can reliably read.
RNGFND1_ORIENT = 25 (i.e. down) if mounted on a boat
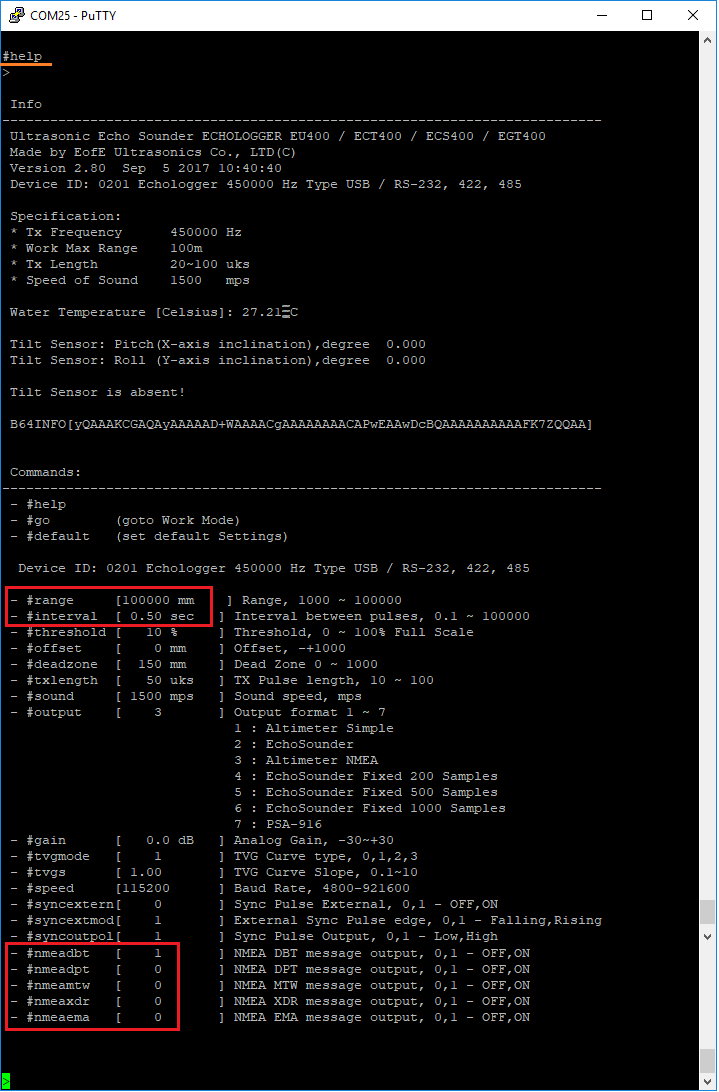
Configuring the sensor¶
By default the sensor comes configured to sample the depth at only 1hz and to a maximum depth of 10m.
Using a USB to RS232 converter connect to the sensor from your PC using a terminal program like Putty (Connection type of “Serial”, Speed of “115200” and Serial line of the appropriate COM port).
If connected properly NMEA data should appear on the console. Type:
#help (to display the help menu)
#range 100000 (to set the range to 100m)
#interval 0.5 (to set update rate to 2hz)
#nmeadpt 0 (to disable dpt message)
#nmeamtw 0 (to disable mtw message)
#nmeaxdr 0 (to disable xdr message)
#nmeaema 0 (to disable ema message
More info on NMEA message contents can be found here
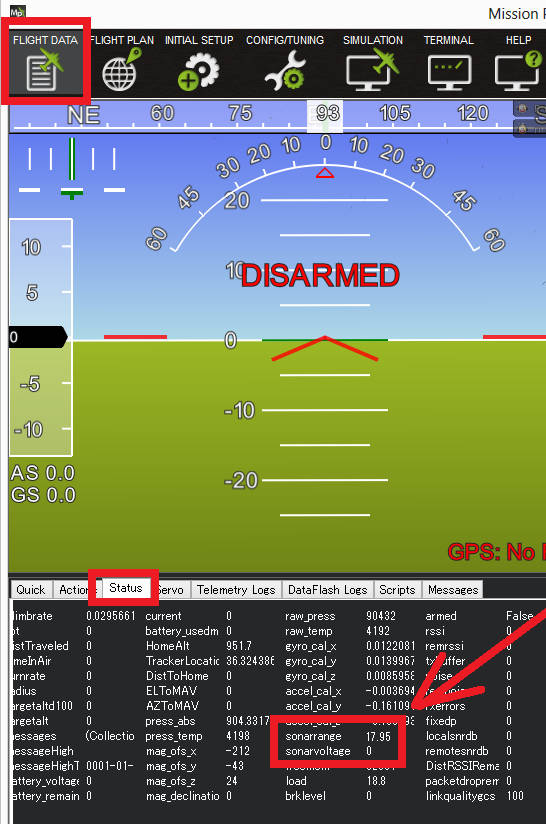
Testing the sensor¶
Distances read by the sensor can be seen in the Mission Planner’s Flight Data screen’s Status tab. Look closely for “rangefinder1”.