Copter Release Procedures¶
ArduPilot is very reliable because bug fixes are prioritised over new features and releases are performed carefully and only after sufficient testing has been completed.
This page outlines the steps that are normally followed for a Copter release. Listed mostly as a reference so that we don’t forget the steps.
Alpha Testing¶
The AutoTester runs after each commit and highlights issues that it has been setup to test.
Developers and some Alpha testers perform intermittent tests of master especially after new features have been added.
Releasing Beta Versions / Release Candidates¶
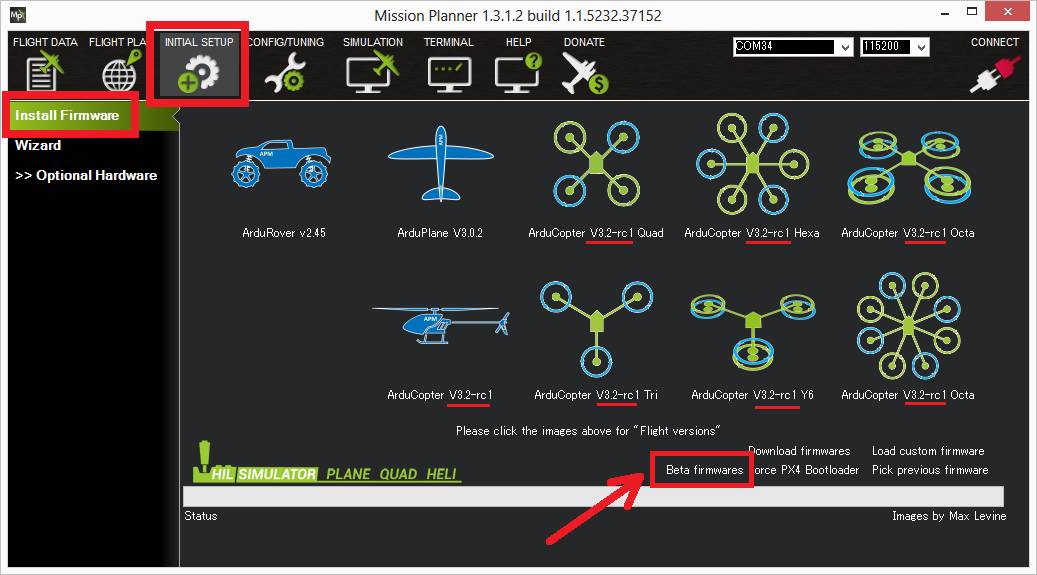
Beta Testing / Release candidates are made available to beta testers through the mission planner’s “Beta firmwares” link. The Mission Planner “Beta firmware” link pulls the firmware from the Copter/beta directory of firmware.ardupilot.org.
Someone with ardupilot GitHub commit access (normally Randy) makes the new firmware available through the following steps:
Create a new release branch or switch to an existing release branch¶
Open a Git Bash terminal in the ardupilot repository.
If this release involves a major or minor version increase (i.e. 4.3 to 4.4) create a new branch in your local ardupilot repository:
git checkout -b Copter-4.4(“Copter-4.4” should be replaced with the correct major and minor version numbers)git pushto create the new directory in the shared repoclick the “New Project” button on the GitHub projects page to create the corresponding “Copter 4.x” project. This is used to track features to be included in future releases
Alternatively if this release is built on an earlier release branch checkout the branch:
git checkout Copter-4.3to switch to the existing release branch (“Copter-4.3” should be replaced with the correct major and minor version numbers)
Pull in changes from master¶
Check the ArduPilot Github Projects to determine which PRs and commits should be included in this release. For example the Copter 4.3 project holds the list of PRs and commits that should be included in the next Copter-4.3 release.
git reset --hard origin/master,git submodule update --recursivecan be used to reset the release branch to master if all of master should be included (this is normal for at least the first few beta releases)
OR
use
gitk masterto cherry-pick in just some changes from master
Check the versions are available in Mission Planner¶
Wait 4hrs to 11hrs for the binaries to be built (check the Build list, autotest-output.txt and/or manifest.json for status) and then open the Mission Planner’s Initial Setup > Install Firmware page and click the “Beta firmwares” link and ensure that the version displayed below each multicopter icon has updated.
Announce the release to the beta testers¶
Let Beta testers know the new version is available by posting on these sites:
Discuss’s Copter category (create a new category if required)
ArduPilot facebook group. Include the contents of the ReleaseNotes.txt so people know what has changed and a video if possible
Issue Tracking¶
beta testers should report issues in the appropriate Discuss Copter forum
the release manager (Randy) with help from other developers should investigate issues and respond with the cause of the problem
confirmed bugs should be added to the ArduPilot Issues List. The issue’s label should be set to “Copter” and Projects and Milestone set to the upcoming release if it should be addressed before release.
Releasing Stable Versions¶
Stable releases are done after weeks or months of beta testing and normally only after two weeks have passed with no unexplained crashes.
The go-no-go decision on a stable release is discussed on the preceding weekly development call. This discussion normally includes a review of the outstanding issues.
Releasing a stable version is the same as a beta version except the ArduCopter-stable and ArduCopter-stable-heli tags are used.
An additional tag is created including the patch release number:
git tag Copter-4.3.0git push origin Copter-4.3.0
Announcements are done in much the same way as beta releases by posting on these sites:
Discuss’s Copter category (create a new category if required)
ArduPilot facebook group. Include the contents of the ReleaseNotes.txt so people know what has changed and a video if possible
Back on Github, Draft a new release and add the Discuss link from above
Mission Planner will also show a pop-up informing users that a new version is available.
Didn’t find what you are looking for?¶
If you think of something that should be added to this site, please open an issue or post a comment on the ArduPilot Discord Chat.