Thunder Tiger Toyota Hilux¶
The Thunder Tiger Toyota Hilux is a relatively inexpensive four wheel drive RC car with a top speed of about 1m/s.
One weakness of this frame is the suspension is a bit soft once the frame is loaded up with the required electronics (autopilot, GPS, receiver) which leads to some body role during stops.
Parts List¶
Thunder Tiger Toyota Hilux frame available from many retailers including Amazon
Hex Cube autopilot or similar
Adafruit ESP8266 wifi telemetry board
any 8 channel (or more) transmitter like the Futaba T10J (the 2 channel transmitter/receiver provided with the frame is not currently supported by ArduPilot)
Mounting the electronics¶

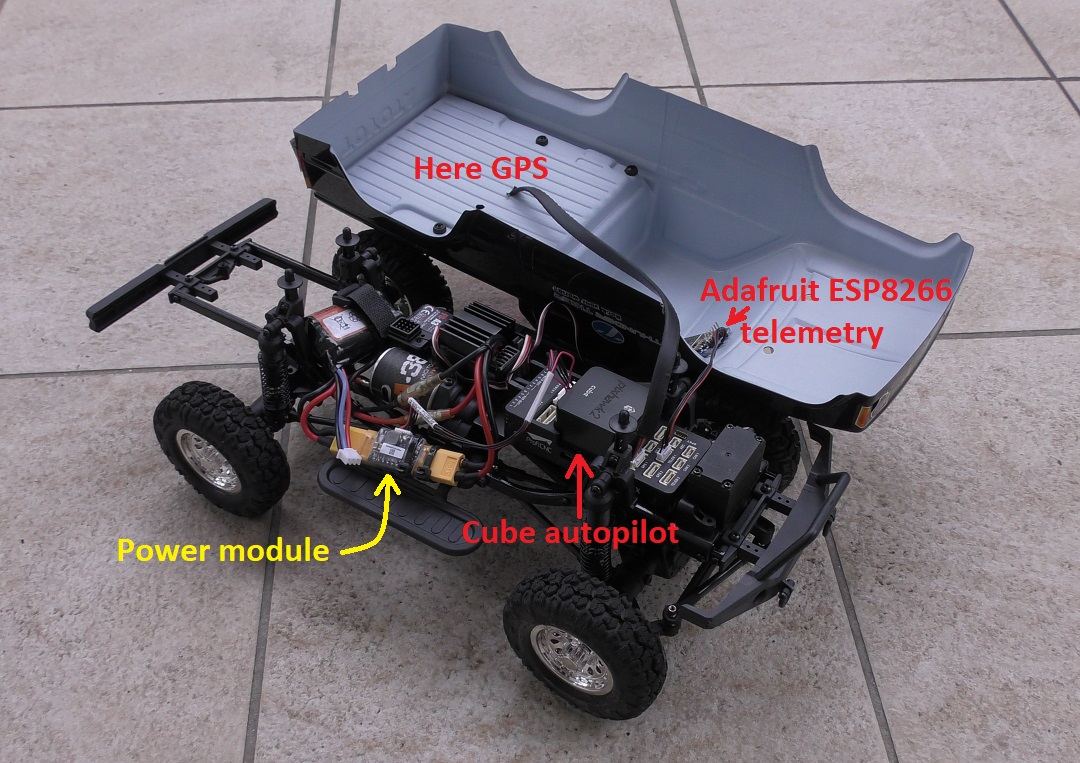
the Cube autopilot fits easily into front portion of the frame of the vehicle
the GPS should be placed away from the motor and battery. In this example it was placed in the rear cargo bed
some soldering is required to allow the 2S battery to plug into the power module
the Adafruit ESP8266 wifi telemetry board should be connected to the Cube’s Telem1 port
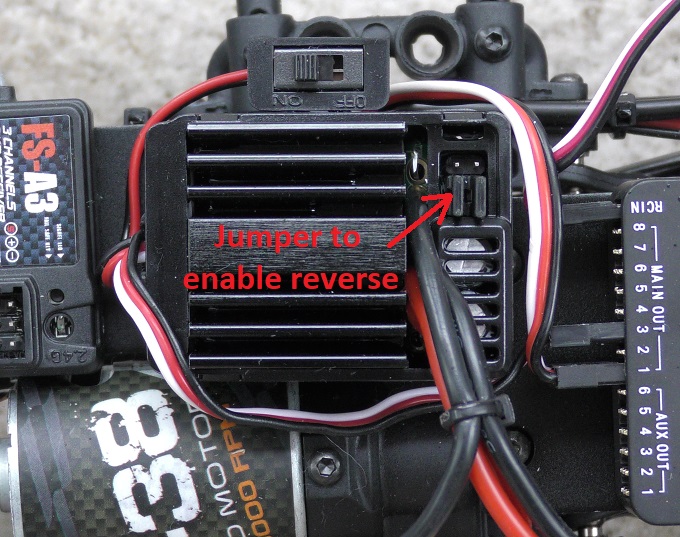
the frame apparently includes this WP-1040-Brushed ESC and the “Reverse” jumper should be set as shown below.
Firmware used: Rover-3.4.1
Parameter file: ThunderTiger-ToyotaHilux-Rover
This parameter file can be loaded using the Mission Planner:
start the Mission Planner and connect to the autopilot
open the Config/Tuning >> Full Parameter Tree page
select “ThunderTiger-ToyotaHilux-Rover” from the drop down on the middle right and then push the “Load Presaved” button
Warning
The parameter file above includes setting the COMPASS_ORIENT parameter “4” (Yaw 180) because the wiring was more convenient if the GPS arrow was pointing backwards