RC Input Channel Mapping (RCMAP)¶
This article shows how to set up a non-standard RC input channel mapping using the RCMAP feature.
Configuration¶
By default the RC input channels are:
Channel 1: Roll input
Channel 2: Pitch input
Channel 3: Throttle input
Channel 4: Yaw input
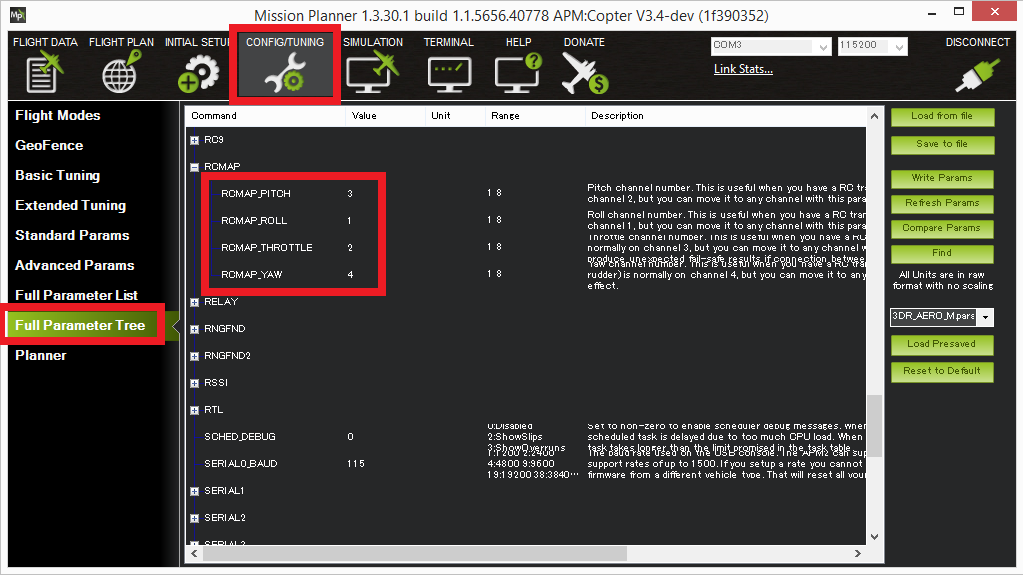
These can be changed by setting the RCMAP_ROLL, RCMAP_PITCH, RCMAP_THROTTLE and RCMAP_YAW parameters using the Mission Planner’s Config/Tuning | Full Parameter Tree (or Full Parameter List) as shown below.
After changing any of these parameters the autopilot should be rebooted.
For multicopters, the RC calibration and ESC calibration should be re-done.
Additional information about the RCMAP parameters can be found in the
Parameters reference.