ArduPilot is open source software that runs on a wide range of hardware.
Success with ArduPilot requires that the 'First Time Setup' and 'First Flight/Drive and Tuning' sections of the vehicle's documentation be read and followed!
ArduPilot enables the creation and use of trusted, autonomous, unmanned vehicle systems for the peaceful benefit of all. ArduPilot provides a comprehensive suite of tools suitable for almost any vehicle and application. As an open source project, it is constantly evolving based on rapid feedback from a large community of users. The Development Team works with the community and commercial partners to add functionality to ArduPilot that benefits everyone. Although ArduPilot does not manufacture any hardware, ArduPilot firmware works on a wide variety of different hardware to control unmanned vehicles of all types. Coupled with ground control software, unmanned vehicles running ArduPilot can have advanced functionality including real-time communication with operators. ArduPilot has a huge online community dedicated to helping users with questions, problems, and solutions

Hardware is the peripheral sensors, controller, and output devices that act as the vehicle’s eyes, ears, brain and arms. Almost any mobile machine can be transformed into an autonomous vehicle, by simply integrating a small hardware package into it. Hardware packages begin with a controller. Using inputs from sensors, the controller is able to send outputs to devices such as ESC’s, servos, gimbals and other peripherals. 
|
Firmware is the code running on the controller. You choose the firmware to match your vehicle and mission: Copter, Plane, Rover, Sub, or Antenna Tracker. The choice is yours – one autopilot for any mission. 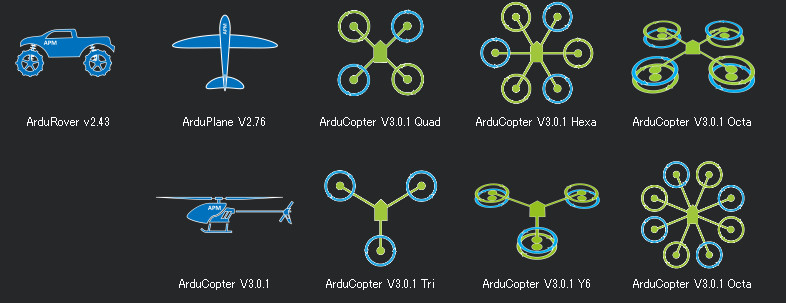
|
Ground Control Station (GCS) is your interface to the controller. Various versions of GCS software are available for Window’s, Linux, and Android platforms. A GCS allows users to set-up, configure, test, and tune the vehicle. Advanced packages allow autonomous mission planning, operation, and post-mission analysis. Mission Planner is a full-featured GCS supported by ArduPilot. It offers point-and-click interaction with your hardware, custom scripting, and simulation. 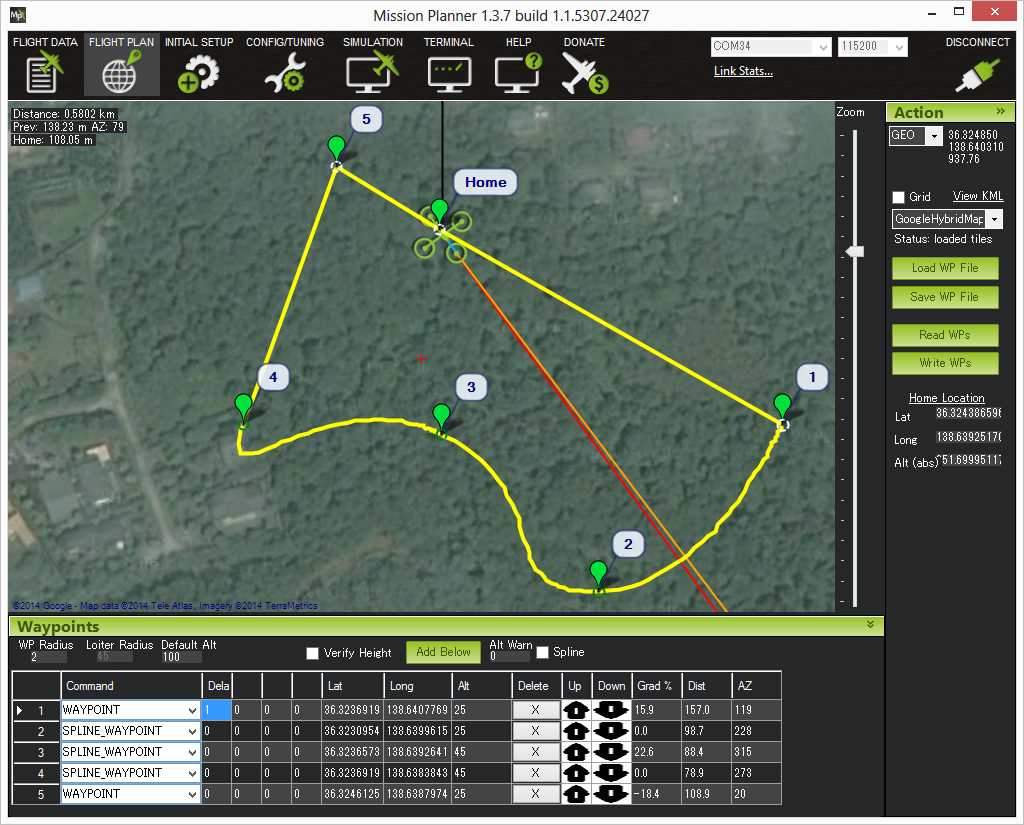
|
ArduPilot Documentation¶
See sidebar for links to ArduPilot documents.
Quickstart¶
Select your vehicle type to the left
Select your “AutoPilot Hardware” and “Peripheral Hardware” for your application
Follow vehicle’s “First Time Setup” for installing the firmware and Ground Station software, connecting the components, and calibration steps
Prepare for “First Flight(/Drive)” completing setup prior to first flight/drive
Advanced Configuration offers setup of more advanced features of the firmware and hardware peripherals
If you can’t readily find an answer to an ArduPilot setup question, you can try AI!. Bear in mind its experimental!
Regulations¶
Every country has different regulations governing the operation of remote controlled and/or autonomous vehicles. This database has country specific information, but it is every operator’s responsibility to be seek out and be aware of local, regional, and federal regulations.
Community¶
Tip
Keep up with the latest ArduPilot related blogs on ArduPilot.org!
Community is what really sets ArduPilot apart from many other offerings in the market. Here are some of the places you can find ArduPilot users and developers:
Developer Community¶
Developers Chat Working on the code? Ask questions of the team in Discord.
Developers Guide All things for those who want to get into the nuts and bolts of ArduPilot development can be found in the Developer Guide.
We have weekly meeting times.
We also have forums
History¶
The DIYDrones community provided an initial home for ArduPilot. From those hobbyist beginnings, ArduPilot led the professionalisation of the Open Source drone community by creating DroneCode. Since leaving DroneCode in 2016 ArduPilot has grown further to stand as an independent, open, global project. The comprehensive and ever growing list of ArduPilot features are continually born from the needs of the community - be they hobbyists, commercial users, academics, or the largest of enterprises. See the History of ArduPilot for more information.
Features¶
|
|
last build Apr 28, 2026