Pixracer¶
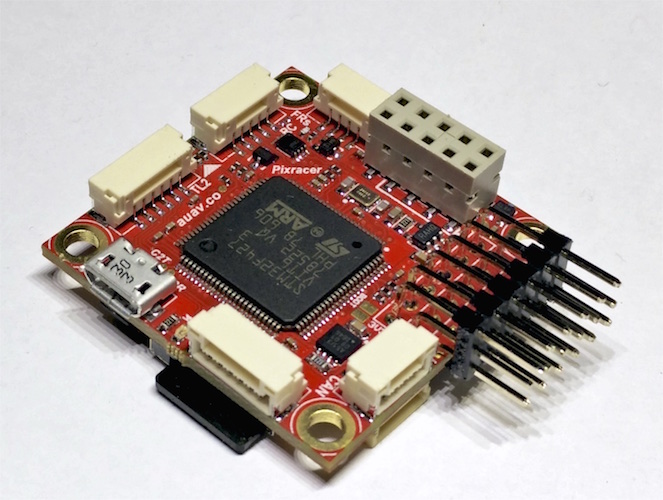
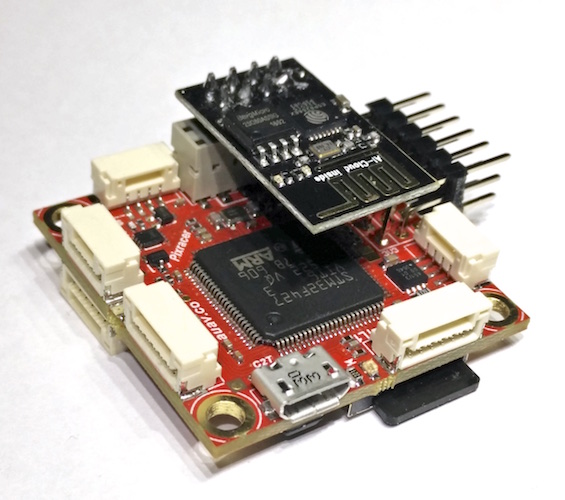
The Pixracer is the first autopilot of the FMUv4 Pixhawk generation. It comes with a small Wifi extension board.

Overview¶
The Pixracer is the common name for the FMUv4 generation of Pixhawk autopilots. It has been designed primarily for the demanding requirements of small multicopters, but of course can be used on planes and other vehicles which require no more than 6 pwm outputs for controlling escs and motors. Pixracer is available from the mRobotics
Tip
At time of writing the autopilot is still being evolved/improved. The final version may very slightly from the information provided here.
This video below provides a detailed overview of the board. Additional information can be found on pixhawk.org and the mRobotics.
Specifications¶
Processor:
MCU - STM32F427VIT6 rev.3
Ultra low noise LDOs for sensors and FMU
FRAM - FM25V02-G
Sensors
Gyro/Accelerometer: Invensense MPU9250 Accel / Gyro / Mag (4 KHz)
Gyro/Accelerometer: Invensense ICM-20608 Accel / Gyro (4 KHz)
Barometer: MS5611
Compass: Honeywell HMC5983 magnetometer with temperature compensation
Power
5-5.5VDC from USB or PowerBrick connector. Optional/recommended ACSP4 +5V/+12V Power Supply.
Interfaces/Connectivity
Wifi: ESP-01 802.11bgn Flashed with MavESP8266
MicroSD card reader
Micro USB
RGB LED
GPS (serial + I2C)
TELEM1/TELEM2
Wifi serial
FrSky Telemetry serial(see note)
Debug connector (serial + SWD)
Connectors: GPS+I2C, RC-IN, PPM-IN, RSSI, SBus-IN, Spektrum-IN, USART3 (TxD, RxD, CTS, RTS), USART2 (TxD, RxD, CTS, RTS), FRSky-IN, FRSky-OUT, CAN, USART8 (TxD, RxD), ESP8266 (full set), SERVO1-SERVO6, USART7 (TxD, RxD), JTAG (SWDIO, SWCLK), POWER-BRICK (VDD, Voltage, Current, GND), BUZZER-LED_BUTTON.
Dimensions
Weight ?
36 x 36mm with 30.5 x 30.5mm hole grid with 3.2mm holes
Note
The FrSky telemetry port is implemented using a 74LVC2G86 NOR gate as a programmable inverter to both the RX and TX lines. See below for use information.
Connector pin assignments¶
Unless noted otherwise all connectors are JST GH
TELEM1, TELEM2+OSD ports¶
| Pin | Signal | Volt |
|---|---|---|
| 1 (red) | VCC | +5V |
| 2 (blk) | TX (OUT) | +3.3V |
| 3 (blk) | RX (IN) | +3.3V |
| 4 (blk) | CTS (IN) | +3.3V |
| 5 (blk) | RTS (OUT) | +3.3V |
| 6 (blk) | GND | GND |
GPS port¶
| PIN | SIGNAL | VOLT |
|---|---|---|
| 1 (red) | VCC | +5V |
| 2 (blk) | TX (OUT) | +3.3V |
| 3 (blk) | RX (IN) | +3.3V |
| 4 (blk) | I2C1 SCL | +3.3V |
| 5 (blk) | I2C1 SDA | +3.3V |
| 6 (blk) | GND | GND |
FrSky Telemetry / SERIAL4¶
| PIN | SIGNAL | VOLT |
|---|---|---|
| 1 (red) | VCC | +5V |
| 2 (blk) | TX (OUT) | +3.3V |
| 3 (blk) | RX (IN) | +3.3V |
| 4 (blk) | GND | GND |
This port has built in inverters on the TX and RX lines and shunt resistors which allow them to be tied together and connected to an FrSky receiver’s SPort input for telemetry. It is on by default, and only SERIAL4_PROTOCOL needs to be set to “10” for FrSky passthrough telemetry to be sent to the receiver. See FrSky Telemetry for more information.
The operation of the TX/RX path inverter can be disabled by setting the SERIAL4_OPTIONS parameter to “2” to “invert” the TX , which will turn off the inversion for both the TX and RX pins. This will allow normal UART operation, if desired.
RC Input (accepts PPM / S.BUS / Spektrum / SUMD / ST24)¶
| PIN | SIGNAL | VOLT |
|---|---|---|
| 1 (red) | VCC | +5V |
| 2 (blk) | RC IN | +3.3V |
| 3 (blk) | RSSI IN | +3.3V |
| 4 (blk) | VDD 3V3 | +3.3V |
| 5 (blk) | GND | GND |
CAN¶
| PIN | SIGNAL | VOLT |
|---|---|---|
| 1 (red) | VCC | +5V |
| 2 (blk) | CAN_H | +12V |
| 3 (blk) | CAN_L | +12V |
| 4 (blk) | GND | GND |
Power¶
| PIN | SIGNAL | VOLT |
|---|---|---|
| 1 (red) | VCC | +5V |
| 2 (blk) | VCC | +5V |
| 3 (blk) | CURRENT | +3.3V |
| 4 (blk) | VOLTAGE | +3.3V |
| 5 (blk) | GND | GND |
| 6 (blk) | GND | GND |
Switch¶
| PIN | SIGNAL | VOLT |
|---|---|---|
| 1 (red) | SAFETY | GND |
| 2 (blk) | !IO_LED_SAFETY | GND |
| 3 (blk) | CURRENT | +3.3V |
| 4 (blk) | BUZZER- | - |
| 5 (blk) | BUZZER+ | - |
Debug port (JST SM06B connector)¶
| PIN | SIGNAL | VOLT |
|---|---|---|
| 1 (red) | VCC TARGET SHIFT | +3.3V |
| 2 (blk) | CONSOLE TX (OUT) | +3.3V |
| 3 (blk) | CONSOLE RX (IN) | +3.3V |
| 4 (blk) | SWDIO | +3.3V |
| 5 (blk) | SWCLK | +3.3V |
| 6 (blk) | GND | GND |
Where to Buy¶
See also¶
Note
Some information and images in this page were copied from pixhawk.org, docs.px4.io and the mRobotics shop