Tuning Ground Steering for a Plane¶
The Plane firmware has the ability to control ground steering if you have either a tail wheel or nose wheel in your aircraft. Ground steering is activated in all modes except MANUAL, and when properly tuned it makes it much easier to keep a plane on a straight track along the runway for takeoff and landing.
Ground steering may be implemented either by using a wheel coupled to a RUDDER output (SERVOx_FUNCTION =21), either mechanically or with an second servo, or with the dedicated GroundSteering output (SERVOx_FUNCTION =26). If the GroundSteering output is assigned, then it operates independently of the RUDDER output, otherwise, the Ground Steering controller’s output controls the RUDDER when below GROUND_STEER_ALT.
When setting up ground steering for a plane there are 4 key parameters you need to get right. This guide provides a set of steps to get those parameters right, so that your plane will accurately track down a runway on the ground.
Controlling steering¶
To enable ground steering you need to set the GROUND_STEER_ALT parameter to something above zero. This is the barometric altitude above the initial altitude at which the steering changes from ground steering of a wheel to rudder steering for aerodynamic control. It is recommended that you set this to 5 meters to allow for a bit of barometric drift.
When ground steering is active it locks onto a compass heading whenever you have no rudder or aileron input. So to steer the plane on the ground while taxiing you should use the rudder to change direction, then take your hand off both rudder and aileron to hold the current compass heading. Ground steering will only work properly if you have a compass enabled.
THE KEY PARAMETERS¶
STEER2SRV_P: This tells the code what the turning circle (as a diameter in meters) is for your plane. It is critical that you get this parameter right, as it tells the code what steering angle to choose to achieve a desired turn rate.
STEER2SRV_I: This is the gain from the integral of steering angle. Increasing this gain causes the controller to trim out steady offsets due to an out of trim vehicle..
STEER2SRV_D: This adjusts the damping of the steering control loop. This gain helps to reduce steering jitter with vibration. It should be increased in 0.01 increments as too high a value can lead to a high frequency steering oscillation that could overstress the vehicle.
STEER2SRV_IMAX: This limits the number of degrees of steering in centi-degrees over which the integrator will operate. At the default setting of 1500 centi-degrees, the integrator will be limited to +- 15 degrees of servo travel. The maximum servo deflection is +- 45 centi-degrees, so the default value represents a 1/3rd of the total control throw which is adequate unless the vehicle is severely out of trim.
STEER2SRV_MINSPD: This is the minimum assumed ground speed in meters/second for steering. Having a minimum speed prevents oscillations when the vehicle first starts moving. The vehicle can still driver slower than this limit, but the steering calculations will be done based on this minimum speed.
STEER2SRV_TCONST: This controls the time constant in seconds from demanded to achieved steering angle. A value of 0.75 is a good default and will work with nearly all rovers. Ground steering in aircraft needs a bit smaller time constant, and a value of 0.5 is recommended for best ground handling in fixed wing aircraft. A value of 0.75 means that the controller will try to correct any deviation between the desired and actual steering angle in 0.75 seconds. Advanced users may want to reduce this time to obtain a faster response but there is no point setting a time less than the vehicle can achieve.
GROUND_STEER_ALT: Altitude at which to use the ground steering controller on the rudder. If non-zero, then the STEER2SRV controller will be used to control the rudder for altitudes below this limit with respect to the home altitude.
STEP 1: SETTING INITIAL PARAMETERS¶
To start the tuning process set the following values:
STEER2SRV_P: = See step 2
STEER2SRV_I: = 0.1
STEER2SRV_D: = 0.02
STEER2SRV_IMAX: = 1500
STEER2SRV_MINSPD: = 1
STEER2SRV_TCONST: = 0.5
GROUND_STEER_ALT: = 5
These are conservative values that should give you reasonable behaviour for most PLANES.
STEP 2: SETTING THE STEER2SRV_P¶
To set your STEER2SRV_P parameter you need to measure the diameter of the turning circle of your plane.
With your motor off put your plane into MANUAL mode, and put the rudder hard over to one side. Then slowly push your plane in a circle. Use a tape measure to measure the diameter of that circle and set STEER2SRV_P to that value in meters. Most planes have a turning diameter of around 4 meters. If your turning diameter is a long way from 4 then you may have the rates or throw on your rudder set incorrectly.
Fixing Problems with weaving¶
A common issue with ground steering is that the steering ‘weaves’, turning from side to side rather than turning smoothly. There can be several possible reasons for this happening.
The first thing you need to work out is if the problem is confined to low speed or also affects higher speed driving. If the problem only happens at very low speed then the most likely problem is that STEER2SRV_MINSPD is too low. The default is 1.0 m/s, which is quite low, and if your GPS heading isn’t very reliable at low speed then you may need to raise that number. Try 2.0 and see if that helps with low speed weaving.
In the steering controller there are 3 key parameters that will control weaving:
A smaller STEER2SRV_P will reduce weaving, try reducing it by 0.1 at a time
A larger STEER2SRV_D will “damp” the weaving, but if you make it too large then you will get high speed oscillation. For example you may find that a value of 0.1 reduces the damping, but a value of 0.2 could cause a high speed oscillation in the steering servo. If you get fast oscillation then reduce the STEER2SRV_D value by 50%.
A larger STEER2SRV_TCONST will slow down the steering controller, which will reduce weaving. Try raising it in steps of 0.1.
With the current controller system you do need to experiment a bit with these values to get the behaviour you want.
Tuning for auto-takeoff¶
To tune the ground steering for auto-takeoff it is generally best to do the tuning in FBWA mode, and only change to auto-takeoff once you can takeoff in FBWA mode without overriding the steering at all (ie. takeoff without using the rudder stick).
It can also be very helpful to use the FBWA Takeoff Elevator option to setup the same automated elevator behaviour as is used in auto-takeoff when in FBWA mode. That helps keep tail wheels on the ground in taildragger aircraft (and can also be used to keep nose wheels on the ground in tricycle aircraft).
Limiting the steering to prevent a roll on a wing¶
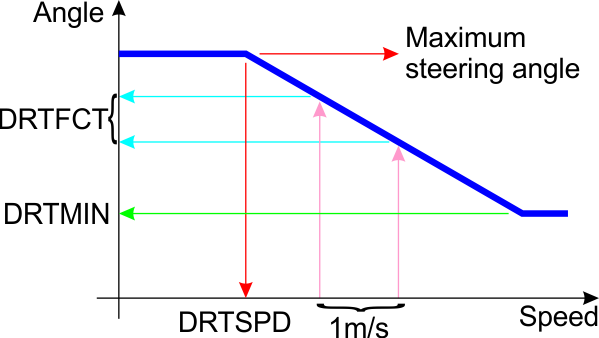
On a large fast planes, especially with large wingspan, there is a chance on rolling on the wing if the steering is too aggressive. To coupe with this problem steering limiting can be setup that will derate steering angles with increasing speed. When the speed is lower than the set derating speed, no limit occurs and the angle for steering is passed through without changes. When the speed increase, the steering angle starts to decrease at a setup rate until the minimum steering angle is reached.
DRTSPD - After this speed the steering angle gets reduced
DRTFCT - Amount of degrees to reduce per each additional m/s increase in speed
DTRMIN - minimum angle of steering that will not be decreased further
The steering angle vs. speed can be illustrated with following chart: