Debugging with GDB on linux¶
This page describes how to setup GDB on Linux to debug issues with ArduPilot with SITL.
Introduction¶
This guide assumes that you have already successfully use SITL on your machine following the instructions to setup SITL.
Installing GDB¶
To install GDB on Linux, please use package installer. If you are on a debian based system (such as Ubuntu or Mint),
simply use the apt install command :
sudo apt install gdb
Setting up SITL¶
In order to use GDB, you need to configure your SITL build with debug symbols. Use :
./waf configure --debug
Raw GDB¶
This method use the command line gdb for debugging. There are 3 possible ways:
run SITL under gdb from the start.
gdb [gdb options] --args path-to-SITL-firmware(generally in build/sitl/bin) [SITL options]
Example: The following launches the default Copter SITL:
gdb --args $HOME/ardupilot/build/sitl/bin/arducopter -S -I0 --home -35.363261,149.165230,584,353 --model + --speedup 1 --defaults $HOME/ardupilot/Tools/autotest/default_params/copter.parm
You can also attach MAVProxy if required
mavproxy.py --master tcp:127.0.0.1:5760 --sitl 127.0.0.1:5501 --out 127.0.0.1:14550 --out 127.0.0.1:14551 --console --map
run gdb with SITL launch script
sim_vehicle.py: simply add-D -Gto build and launch SITL with debug symbols and in gdb directly :
sim_vehicle.py -v ArduCopter -f quad --console --map -D -G
here is a video of its use:
you can also attach to an already running SITL process. You can get the SITL process id with
pidof [vehicle type : arducopter, arduplane, ardurover].
gdb path-to-binary(build/sitl/bin/) SITL-process-id
When gdb is launched you should be able to use it to debug ArduPilot like any other program. If you don’t know how to use gdb from commandline, please look on the net for some tutorial, a simple one can be found here. Don’t forget that you can crash your drone on SITL safely !
With IDE¶
For those that are not used to commandline, there are plenty ways to use gdb for debugging with GUI. Here are some.
For Ubuntu user, the default protections will prevent you to attach gdb to SITL from IDE : see here.
This will lead to an error message ptrace: Operation not permitted on your first attempt to attach to a local process.
In this case, do one of the following:
To disable this restriction temporarily, enter the command:
echo 0 | sudo tee /proc/sys/kernel/yama/ptrace_scope
To disable this restriction permanently, open the
/etc/sysctl.d/10-ptrace.conffile for editing and change the line kernel.yama.ptrace_scope = 1 to kernel.yama.ptrace_scope = 0. To apply the changes immediately, enter the above command. Alternatively, runsudo service procps restartor simply restart your system.
CLION¶
Jetbrains website Clion is a paid product, but free for student !
Open ArduPilot directory.
Launch SITL with launch script sim_vehicle.py : simply add -D to build and launch SITL with debug symbols :
sim_vehicle.py -v ArduCopter -f quad --console --map -D
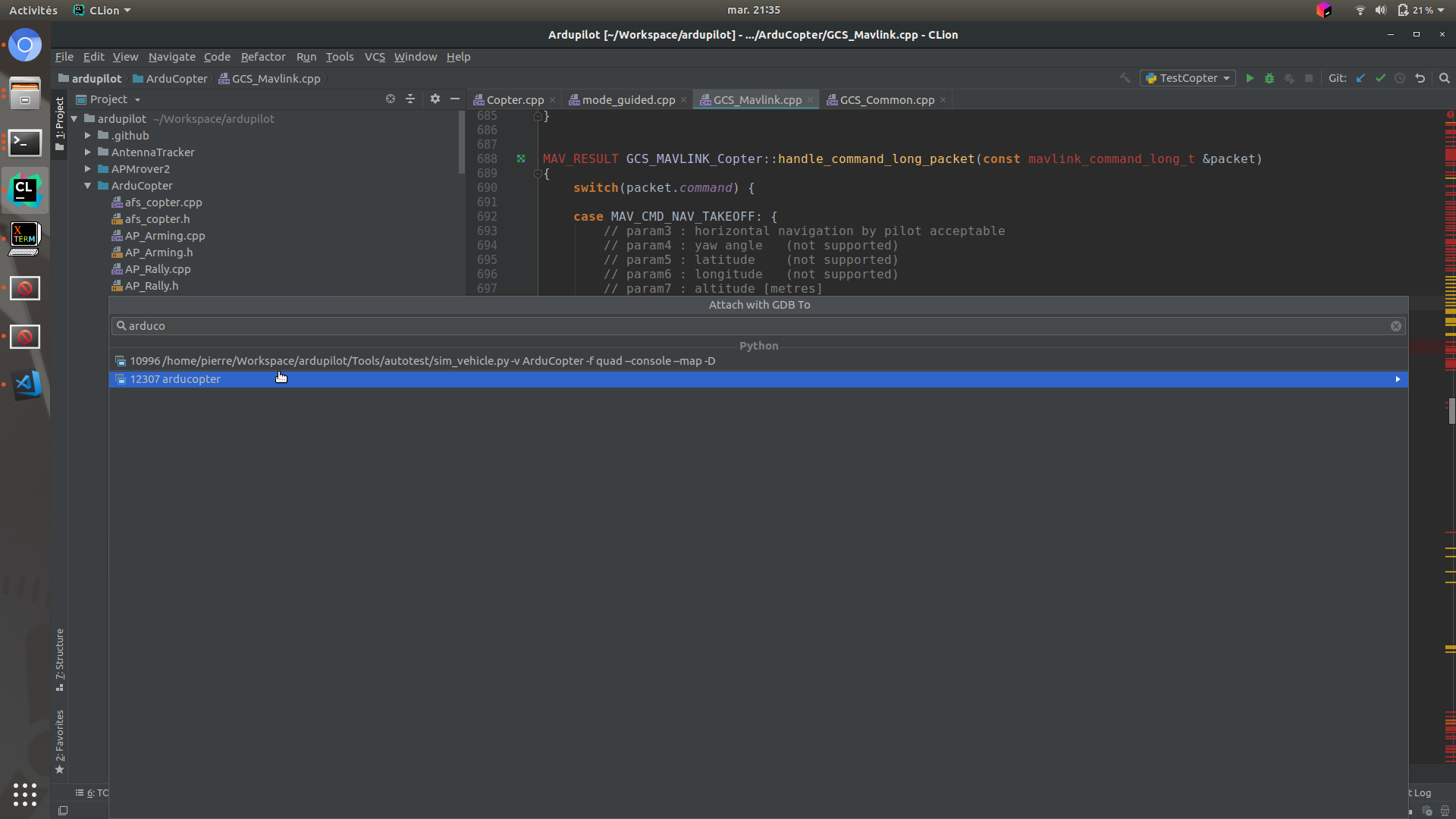
In Run menu, select Attach to Local Process...
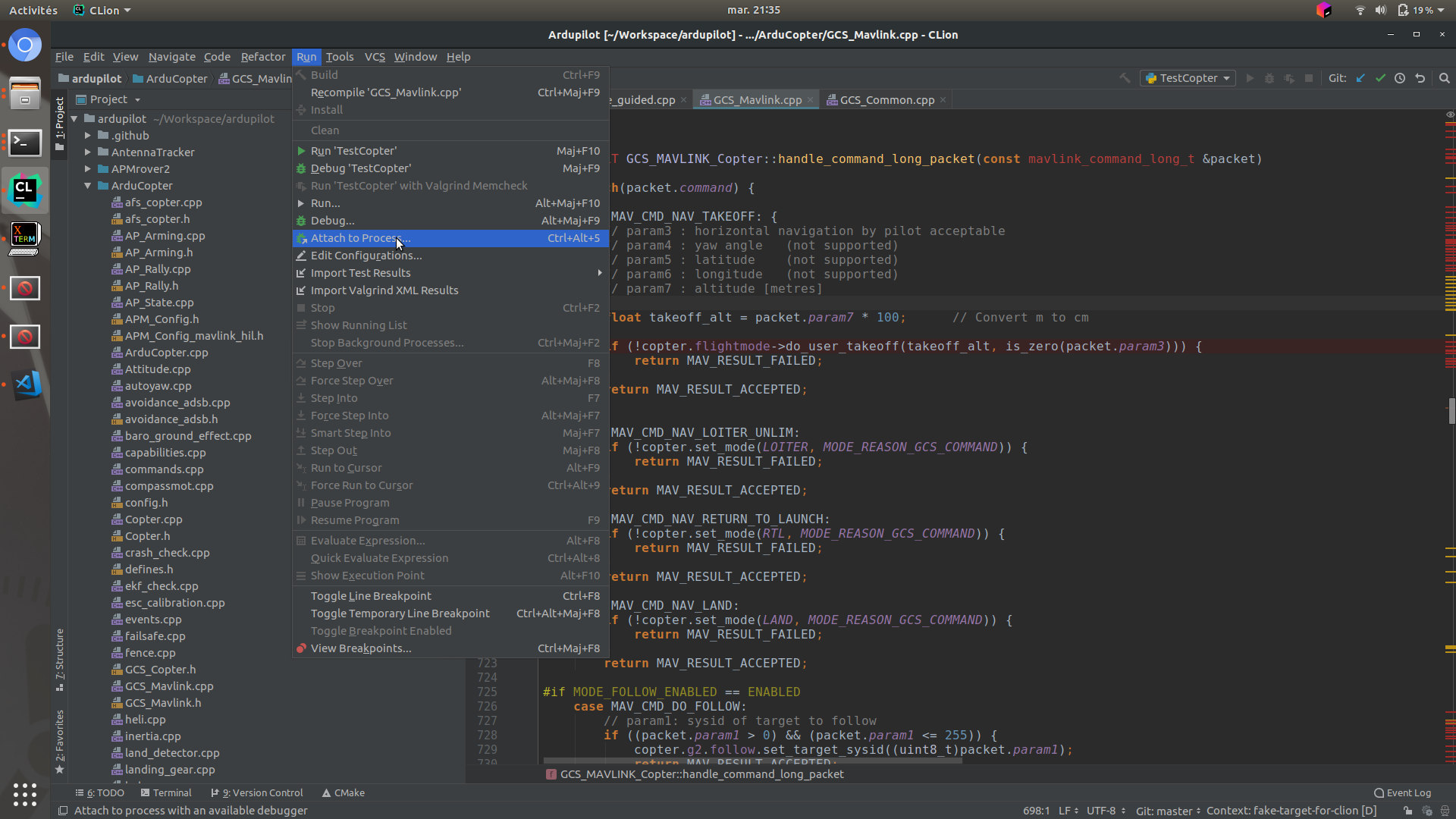
, and type arducopter or the other vehicle name you want to debug.
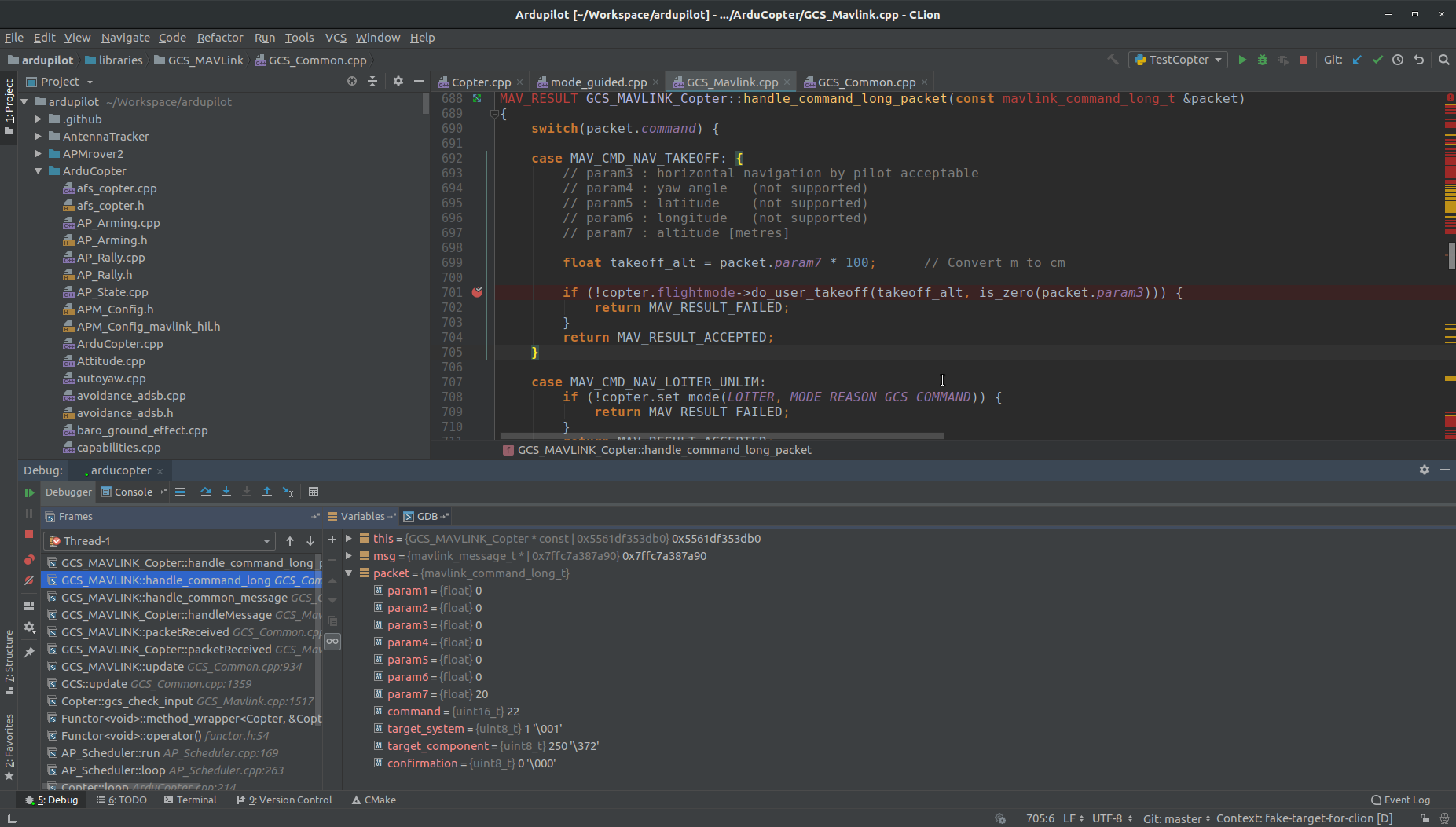
Now you can put breakpoint in the code and start debugging !